跳转至
Quick Reference
- Chip Documents

1. 开箱即用
下面描述了启动i.MX7Dual Sabre的步骤。
开发套件包含:
- 面向智能设备的i.MX7Dual Sabre板
- USB线缆(Micro-B至Standard-A)
- 线缆-组装, USB 3.0 A型公接头, USB micro-B型公接头, 屏蔽线, 1米
- 5V/5A通用电源
- 快速入门指南
- 带可启动操作系统的8 GB SD卡演示镜像
1.1 熟悉板
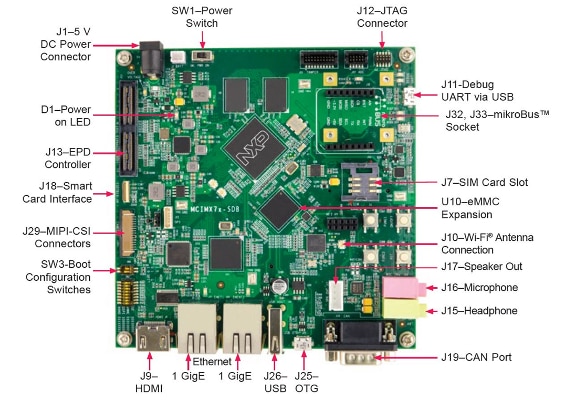
图1. i.MX7Dual Sabre正面

图2. i.MX7Dual Sabre背面
1.2 插入SD卡(SD1/J6)
该套件带有含预建恩智浦Linux二进制演示镜像的SD卡。无需修改SD卡内的二进制文件,从该SD卡启动将提供具有某些功能的默认系统,在Linux上构建其他应用。下面的部分介绍了该软件。
1.3 连接USB调试线缆
将所提供的USB线缆的micro-B端连接到调试UART端口J11。将线缆的另一端连接到主机。
如果您不确定如何使用终端应用,请尝试以下教程之一,具体取决于主机的操作系统:
Linux
Windows

Windows
连接HDMI线缆
要查看随SD卡镜像二进制文件提供的用户界面,请通过HDMI接头(J9)连接显示器。
1.5 启动开关设置
点击此处查看启动开关设置
1.6 接通电源
将5V电源线与5V DC电源插头(J1)连接。
翻转开关为板通电(SW1)。处理器开始执行片上ROM的代码。使用默认开关启动设置,代码读取保险丝,定义可能有可启动镜像的介质。在SD卡上找到可启动镜像后,U-Boot执行应自动开始。
信息打印在Cortex-A7数量较少的串行控制台中(Windows上以COM9为示例,在Linux上为/dev/ttyUSB*)。如果不停止U-boot流程,就会继续启动Linux内核。
Windows上的运行作为示例
1.7 祝贺您!Linux®已启动!
一旦启动了Linux,使用用户名root进行登录,无密码。
提示:要转至U-Boot,在U-Boot环境变量bootdelay值降低和超时(默认3秒)之前,按任意键。如果停止U-boot流程,可运行以下命令来继续Linux启动流程:
# bootMinicom教程
设置串行通信控制台
在Linux主机上命令提示符上,运行以下命令以确定端口号:
$ ls /dev/ttyUSB*
较小的数适用于Cortex-A7,较大的数适用于Cortex-M4。
Minicom
使用以下命令安装串行通信程序(以minicom为例):
- 安装Minicom Ubuntu包管理器。
$ ls /dev/ttyUSB* - 启动Minicom使用先前确定的端口号使用控制台窗口。
$ sudo minicom /dev/ttyUSB* -s - 配置 Minicom如[Minicom配置]中如示
- 下一步是[连接HDMI线缆]。

图3. Minicom配置
Tera Term教程
设置串行通信控制台
i.MX7Dual上的FTDI USB串行芯片将枚举两个串行端口。假设这些端口为COM9和COM10。较小的端口号( COM9)适用于来自Cortex-A7的串行控制台通信,而较大的端口号(COM10)适用于Cortex-M4。串行转USB驱动程序在http://www.ftdichip.com/Drivers/VCP.htm.提供。
注:要确定i.MX板虚拟COM端口的端口号,请打开Windows器件管理器并在端口(COM和LPT)中查找“USB串行端口”
Teraterm
它是一个款受欢迎的开源终端仿真应用。此程序显示从恩智浦开发平台的虚拟串行端口中发送的信息。
- 下载 Tera Term。下载完成后,运行安装程序,然后返回到该页面继续操作。
- 启动TeraTerm。首次启动时,会显示以下对话。选择串行选项。假设您已插入板,列表中会自动填充一个COM端口。
- 配置串行端口设置(使用之前确定的COM端口号),波特率为115200,数据位为8,无奇偶校验并且停止位为1。要进行此操作,进入Setup → Serial Port并更改设置。
- 确认连接已打开。如已连接,Tera Term将在标题栏中显示以下内容。
- 下一步是[连接HDMI线缆]。


PuTTY教程
设置串行通信控制台
i.MX7Dual上的FTDI USB串行芯片将枚举两个串行端口。假设这些端口为COM9和COM10。较小的端口号( COM9)适用于来自Cortex-A7的串行控制台通信,而较大的端口号(COM10)适用于Cortex-M4。串行转USB驱动程序在http://www.ftdichip.com/Drivers/VCP.htm.提供。
注:要确定i.MX板虚拟COM端口的端口号,请打开Windows器件管理器并在端口(COM和LPT)中查找“USB串行端口”
PuTTY是一款广受欢迎的终端仿真应用。此程序显示从恩智浦开发平台的虚拟串行端口中发送的信息。
- 下载 PuTTY下载完成后,运行安装程序,然后返回到该页面继续操作。
- 启动PuTTY,可双击下载的*.exe文件或从开始菜单启动,具体取决于您所选的下载类型。
- 配置在启动的窗口中进行。选择Serial单选按钮并输入之前确定的COM端口号。还要输入波特率,在本例中,为
115200。 - 点击“Open”,打开串行连接。假设板已连接,并已输入正确的COM端口,此终端窗口会打开。如果配置不正确,PuTTY将会发出提示。
- 下一步是[连接HDMI线缆]。

嵌入式Linux®
本部分仅适用于试图将Linux操作系统加载到板的情况。
i.MX Linux板级支持包(BSP)是一系列二进制文件、源代码和支持文件,可用来启动特定i.MX开发平台上的Embedded Linux镜像。
当前Linux二进制演示文件版本可在i.MX Linux下载页面找到。Linux用户指南和Linux参考手册提供更多信息。i.MX Linux文档包或i.MX软件和开发工具的Linux部分提供其他文档。
2.1 概述
Linux操作系统内核在i.MX板上启动前,需要将Linux镜像复制到启动器件(SD卡、eMMC等),而启动开关需要设置为启动此器件。
为不同的板、启动器件和下载Linux BSP镜像有多种方法。
对于本入门指南,仅列出了将Linux BSP镜像传输到SD卡的几种方法。经验丰富的Linux开发人员可探究其他选项。
2.1.1 下载恩智浦Linux BSP预构建镜像
i.MX 8QuadMax MEK最新的预构建镜像在Linux下载页面提供。The file L4.14.78_1.0.0_ga_images_MX7DSABRESD.zip gathers every artifact required to boot the board.
预建的恩智浦Linux二进制演示镜像提供典型系统和基本的功能集,用于使用和评估处理器。无需修改系统,用户就可以评估硬件接口、测试SoC功能并运行用户空间应用。
当需要更多灵活性时,SD卡可逐一与单个组件(引导加载程序、内核、dtb文件和roofs文件)一起加载,或者可加载.sdcard镜像,并且特定组件可以覆盖单个部件。
2.1.2 使用UUU刻录恩智浦Linux BSP镜像
In addition to the connections from Out of box chapter, connect the J25 to the host machine using the proper USB cable.
为电路板断电。Consult Boot switch setup and configure the board to boot on SDP (Serial Download Protocol) mode.
根据主机中使用的操作系统,将Linux BSP镜像传输到SD卡的方式可能会有所不同。
从下面的选项中进行选择,获取详细指导:
2.2 Linux
2.1.2.1. Install UUU on Linux Distro
从UUU GitHub页面下载最新的stable文件。有关UUU的详细教程可在https://github.com/NXPmicro/mfgtools/wiki中找到。
- uuu
- libusb1 (通过apt-get或任何其它资源包管理器)
2.1.2.1.1. Burn the NXP Linux BSP image to the board
By default, this procedure flashes the image to the SD card flash. 查看UUU GitHub页面,了解如何将镜像闪存到其他器件。
Open a terminal application and change directory to the location where uuu and the latest Linux distribution for i.MX7Dual Sabre are located. 向uuu文件添加执行权限并执行。Uuu等待USB设备连接
$ chmod a+x uuu
$ sudo ./uuu L4.14.78_1.0.0_ga_images_MX7DSABRESD.zip
为电路板通电,uuu开始将镜像复制到电路板。
When it finishes, turn off the board, and consult Boot switch setup to configure the board to boot from SD card.
2.3 Windows
2.1.2.2. Install UUU on Windows
从UUU GitHub页面下载最新的stable文件。有关UUU的详细教程可在https://github.com/NXPmicro/mfgtools/wiki中找到。
- uuu
- Serial USB drivers (depending on your board and Windows installation - check Windows Device Manager)
2.1.2.2.1. Burn the NXP Linux BSP image to the board
By default, this procedure flashes the image to the SD card flash. 查看UUU GitHub页面,了解如何将镜像闪存到其他器件。
Open the Command Prompt application and navigate to the directory where the uuu.exe file and the Linux release for the i.MX7Dual Sabre are located.
> uuu.exe L4.14.78_1.0.0_ga_images_MX7DSABRESD.zip
为电路板通电,uuu开始将镜像复制到电路板。
When it finishes, turn off the board, and consult Boot switch setup to configure the board to boot from SD card.
嵌入式Android™
本节介绍了带嵌入式Android系统镜像的i.MX7Dual Sabre板的启动过程,并简介了如何构建软件组件,创建您自己的系统镜像。如需了解构建Android平台的更多信息,请参见https://source.android.com/source/building.html
当前版本包括演示镜像、源代码和文档。在i.MX软件和开发工具下的Android部分也提供上述项目。
3.1 概述
开发系统(MMC/SD或NAND)上的存储器件必须采用U-Boot启动加载程序来编程。启动过程确定了将访问哪些存储器件,具体取决于开关设置。当启动加载程序已加载并开始执行时,可读取U-Boot的环境空间,以确定如何继续启动过程。
镜像可来自预建版本数据包或使用源代码创建。无论采用哪种方式获取,所有Android镜像都包含以下组件:
-
U-Boot镜像:
u-boot.imx -
启动镜像:
boot.img -
Android系统根镜像:
system.img -
恢复根镜像:
recovery.img
如需了解有关Android BSP的更多信息,请参见Android用户指南。
根据主机中使用的操作系统,将Android BSP镜像传输到SD卡的方式可能会有所不同。
3.1.1 下载恩智浦Android BSP镜像
预建恩智浦Android演示镜像将为默认系统提供某些功能,以便进行评估。无需修改系统,用户可以执行一些基本操作,并与系统交互来测试硬件接口,并在用户空间开发软件应用。
数据包中的预建镜像可根据启动器件来分类,并连同器件名放入目录。最新的预建镜像文件可在i.MX软件和开发工具的Android部分找到,也可在演示镜像下载链接中找到。
3.1.2. 使用UUU刻录恩智浦Android BSP镜像
In addition to the connections from Out of box chapter, connect the J25 to the host machine using the proper USB cable.
为电路板断电。Consult Boot switch setup and configure the board to boot on SDP (Serial Download Protocol) mode.
从下面的选项中进行选择,获取详细指导:
3.2 Linux
3.1.2.1. Download UUU on Linux
从UUU GitHub页面下载最新的stable文件。有关UUU的详细教程可在https://github.com/NXPmicro/mfgtools/wiki中找到。
- uuu
- libusb1 (通过apt-get或任何其它资源包管理器)
3.1.2.2. 下载最新的Android镜像
从NXP.com下载Android演示文件。
将已下载的文件提取到已知目录。
3.1.2.3. Burn the NXP Linux BSP image to the board
By default, this procedure flashes the image to the SD card flash. 查看UUU GitHub页面,了解如何将镜像闪存到其他器件。
将名为uuu的文件从“下载UUU on Linux”一节复制到提取的Android演示目录。
向uuu文件添加执行权限并执行。uuu等待USB设备连接。
$ chmod a+x uuu
$ sudo ./uuu {UUU_ANDROID_FILE}
在串行下载模式为电路板通电,uuu开始将镜像复制到电路板。要将电路板置于串行下载模式,遵循启动开关设置一节的说明。
When it finishes, turn off the board, and consult Boot switch setup to configure the board to boot from SD card.
3.3 Windows OS
3.1.3. Download UUU on Windows
从UUU GitHub页面下载最新的stable文件。有关UUU的详细教程可在https://github.com/NXPmicro/mfgtools/wiki中找到。
- uuu
- Serial USB drivers (depending on your board and Windows installation - check Windows Device Manager)
3.1.4. Download the latest Android images
从NXP.com下载Android演示文件。
将已下载的文件提取到已知目录。
3.1.5. Burn the NXP Linux BSP image to the board
By default, this procedure flashes the image to the SD card flash. 查看UUU GitHub页面,了解如何将镜像闪存到其他器件。
将名为uuu的文件从“下载UUU on Windows”一节复制到提取的Android演示目录。
向uuu文件添加执行权限并执行。uuu等待USB设备连接。
> uuu.exe {UUU_ANDROID_FILE}
在串行下载模式为电路板通电,uuu开始将镜像复制到电路板。要将电路板置于串行下载模式,遵循启动开关设置一节的说明。
When it finishes, turn off the board, and consult Boot switch setup to configure the board to boot from SD card.
FreeRTOS™
本节描述如何下载面向i.MX7Dual的FreeRTOS。FreeRTOS是一个可选的实时操作系统(RTOS),在我们的一些产品中恩智浦用其启用Cortex-M内核。启用Cortex-M内核是一个可选步骤。如果您此时不想在i.MX7Dual上启用Cortex-M4,则可跳过本节。
面向i.MX7Dual的FreeRTOS BSP具有一套耐用的外设驱动程序和多核通信机制,旨在简化并加快i.MX7Dual处理器上的应用开发。
面向i.MX7Dual的FreeRTOS BSP包含开源许可下的完整源代码,适用于所有演示、示例、中间件和外设驱动程序软件。
4.1 概述
面向i.MX7Dual的FreeRTOS BSP包含以C语言编写的以下运行时软件组件:
- Arm® Cortex微控制器软件接口标准(CMSIS)内核、DSP标准库和符合CMSIS器件标头文件,可直接访问外设寄存器和位。
- 一组外设驱动程序,可为封装了外设寄存器访问的API提供简单、无状态的驱动程序。
- 多核通信机制(RPMsg),可降低多核通信的开发困难。
- FreeRTOS操作系统,可提供事件触发的抢占式调度实时操作系统。
The demos/examples in FreeRTOS BSP are built for on-chip Tightly Coupled Memory (TCM) in the Arm® Cortex®-M4® core.
4.2 下载恩智浦FreeRTOS源文件和演示
恩智清FreeRTOS BSP和源代码的当前版本可以在下面的链接中找到。可以选择下载适用于Windows操作系统的 自解压安装程序或适用于Linux操作系统的tarball。
FreeRTOS BSP树形图的安装目录下有四个主要方面,可用来为每个演示应用提供完整源代码:

示例文件夹包含所有演示/示例源代码和板配置文件。所有21种应用按板名称分类。中间件文件夹包含演示/示例所用的所有中间件的源代码。中间件文件夹包含开源多核通信协议栈RPMsg。平台文件夹包含CMSIS标头文件、外设驱动程序、启动、实用工具和链接器文件等主要组件的源代码。实时操作系统文件夹包含市场领先的实时操作系统FreeRTOS的源代码。
FreeRTOS BSP带有丰富的演示应用和启动程序示例。To see what’s available, browse the BSP examples folder and select the i.MX7Dual Sabre board
(
To learn more about demo applications or driver examples, open the FreeRTOS i.MX7Dual Demo Application User’s Guide, located in
如果您对其中的一个或几个演示应用或驱动程序示例感兴趣,您可能想知道如何自己完成构建和调试。FreeRTOS BSP快速入门指南按步骤介绍了如何轻松地为SDK支持的所有工具链配置、构建和调试演示。
根据主机使用的操作系统,构建和部署演示的方式可能有所不同。
从下面的选项中进行选择,获取详细指导:
4.3 在Linux上构建FreeRTOS
4.3.1 安装工具链
-
从
launchpad.net/gcc-arm-embedded下载并运行安装程序。这是我们实际要用的工具链。该工具链包含编译器、链接器等。GCC工具链应当对应最新的支持版本,参见已下载包中的FreeRTOS BSP版本说明。 -
将工具链导出至
ArmGCC_DIR。$ export ArmGCC_DIR=/usr
注:
/usr是您apt-get gcc-arm-none-eabi时的常用安装目录。如果它发生了改变,则需要更改目录。 -
确保安装了
cmake:$ sudo apt-get install cmake
$ sudo apt-get install gcc-arm-none-eabi
4.3.2 构建FreeRTOS演示应用
-
将命令窗口的目录更改为demo
armgcc目录并运行build命令:$ cd
/examples/imx7d_sdb_m4/demo_apps/ /armgcc $./build_all.sh
-
每个FreeRTOS BSP项目支持两种项目配置(构建目标):
-
编译器优化设置为低,生成可执行文件的调试信息。选择此目标是为了开发和调试。
-
编译器优化设置为高,不生成调试信息。选择此目标是为了最终应用部署。
调试
版本
注:提供脚本文件,用来构建这两种配置。在本示例中,构建
Debug目标并在命令行中键入build_debug.sh。如想选择Release目标,则键入build_release.sh。 -
-
上一个命令生成调试和版本二进制文件(
.bin),以启动Cortex- M4。这些文件位于调试目录和版本目录中。将其中一个二进制文件复制到SD卡的启动区。
4.4 在Windows上构建恩智浦FreeRTOS
4.4.1 安装工具链
从launchpad.net/gcc-arm-embedded下载并运行安装程序。这是我们实际要用的工具链。该工具链包含编译器、链接器等。GCC工具链应当对应最新的支持版本,参见已下载包中的FreeRTOS BSP版本说明。
4.4.2 安装MinGW
Minimalist GNU for Windows (MinGW)开发工具提供了一套不依赖第三方C-Runtime DLL (如Cygwin)的工具。FreeRTOS BSP所用的构建环境无需使用MinGW Build工具,但充分利用了MinGW和MSYS的基础安装。MSYS为与Unix类似的接口和工具提供基本的Shell。
-
从https://sourceforge.net/projects/mingw/files/Installer/下载最新的MinGW mingw-get-setup安装程序。
-
运行安装程序。推荐的安装路径为
C:\MinGW,但是,您可以将其安装到任何位置。注:此安装路径不包含任何空格。
-
确保在Basic Setup下选择了
mingw32-base和msys-base。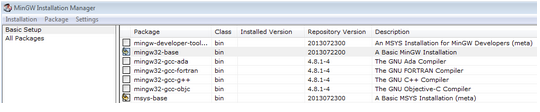
图13. MinGW文件
-
点击
Installation(安装)菜单中的Apply Changes(应用更改),并按照其余指令完成安装。
图14. 应用更改
-
添加相应项目到Windows操作系统的Path环境变量。在"Environment Variables..."部分的Control Panel → System and Security → System → Advanced System Settings下可找到它。The path is:
\bin 重要提示:假设默认安装路径为
C:\MinGW,此例如下所示。如果路径设置不正确,工具链将不起作用。
如果您的PATH变量中包含C:\MinGW\msys\x.x\bin(根据KSDK 1.0.0要求),删除该路径以确保新的GCC构建系统正常工作。 -
创建新的
系统环境变量并命名为ArmGCC_DIR。此变量的值应当指向Arm GCC嵌入式工具链安装路径,此例中的安装路径为:C:\Program Files (x86)\GNU Tools Arm Embedded\4.8 2014q3参考GNU Arm GCC嵌入式工具的安装文件夹,获得确切的安装路径名。

图15. 变量名称
4.4.3 安装CMake
-
从https://www.cmake.org/cmake/resources/software.html下载CMake 3.0.x
-
安装CMake前,确保选择了Add CMake to system PATH选项。由用户选择是为所有用户还是只为当前用户将其安装到PATH。在本示例中,假设为所有用户安装了此应用。
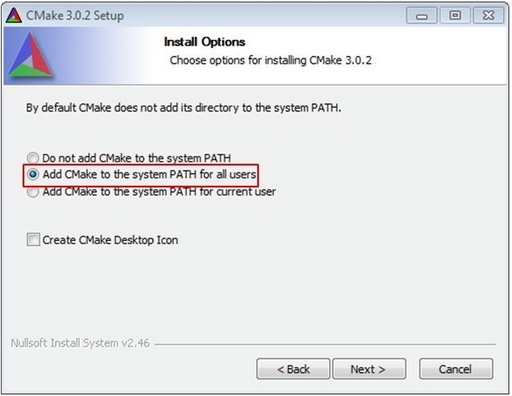
图16. 安装CMake
- 按照安装程序的其余指令操作。
注:可能需要重启系统,才能使PATH更改生效。
4.4.4 构建演示应用
-
打开GCC Arm嵌入式工具链命令窗口。To launch the window, from the Windows operating system Start menu, go to Programs → GNU Tools Arm Embedded version> and select GCC Command Prompt.

图17. GCC命令提示符。
-
将命令窗口的目录更改为demo
armgcc目录并运行build命令:\examples\imx7d_sdb_m4\demo_apps\ \armgcc 或双击Explorer中的
build_all.bat文件,执行构建。预计输出显示如图:
图18. 构建结果
-
每个FreeRTOS BSP项目支持两种项目配置(构建目标):
-
编译器优化设置为低,生成可执行文件的调试信息。选择此目标是为了开发和调试。
-
编译器优化设置为高,不生成调试信息。选择此目标是为了最终应用部署。
调试
版本
注:提供脚本文件,用来构建这两种配置。在本示例中,构建
Debug目标并在命令行中键入build_debug.bat。如想选择Release目标,则键入build_release.bat。 -
-
上一个命令生成调试和版本二进制文件(
.bin),以启动Cortex- M4。这些文件位于调试文件夹和版本文件夹中。将其中一个二进制文件复制到SD卡的启动区。
4.5 采用U-Boot运行应用
本部分介绍了采用SD卡和i.MX处理器的预建U-Boot镜像运行应用的步骤。
- 按照嵌入式Linux®选项卡的步骤,准备一张SD卡,其中包含来自i.MX7Dual处理器Linux BSP包的预建U-Boot + Linux镜像。如已加载了带有Linux镜像的SD卡,可跳过这一步。
- 将SD卡插入主机(Linux或Windows),并将想要运行的应用镜像(例如
hello_world.bin)复制到SD卡的FAT分区。 - 从PC中安全地取出SD卡
- 将SD卡插入目标板。确保使用默认的SD启动插槽,并双重检查启动开关设置. 验证板的默认配置从SD1/J6启动,在Sabre板上,只有一个SD插槽可用来启动。
-
通过USB线缆连接板上的“DEBUG UART”插槽与PC。Windows操作系统自动安装USB驱动程序,Ubuntu操作系统也将找到串行器件。
有关串行通信应用的更多说明,请参阅开箱即用的串行通信控制台设置部分。
- 打开i.MX7Dual Sabre板第二个枚举的串行端口的第二个终端仿真器。这是Cortex-M4的串行控制台。设置速率为
115200bps,数据位为8,无奇偶校验位,并接通板电源。 -
在U-Boot倒计时到零之前按任意键,接通板电源并停止启动过程。在第一个终端仿真器的U-Boot提示符处,键入U-Boot的以下命令。
-
=> fatload mmc 2:1 0x7F8000.bin -
=> dcache flush -
=> bootaux 0x7F8000
-
这些命令将FreeRTOS存储器镜像文件从SD卡的第一个分区复制到Cortex-M4存储器,并从复位中释放M4。
在FreeRTOS BSP中,以ddr或ocram名称结尾的一些应用应当在DDR或OCRAM中运行。以qspi结尾的名称应从外部QSPI闪存中来启动。
有关如何从其他存储启动的说明,请参阅6.2和6.3部分《FreeRTOS快速入门》 -- 在“下载恩智浦FreeRTOS源文件和演示”部分的文件包中可以找到。
4.6 示例演示
提供的演示和示例应用是为了演示外设驱动程序、FreeRTOS内核、RPMsg用途,并突出i.MX7Dual处理器的主要特性。
FreeRTOS BSP提供两种类型的软件应用:
- 演示:这些应用意在突出i.MX7Dual SoC中Arm® Cortex®-M4内核的主要功能,重点强调FreeRTOS操作系统的特殊用例。
- 示例:简单应用,旨在简要说明如何在裸机环境中使用FreeRTOS BSP的外设驱动程序。
4.6.1 Cortex-M4独立传感器演示
i.MX7Dual传感器演示是一个简单的演示程序,可使用恩智浦提供的FreeRTOS和一套驱动程序。它可以获取板当前的重力加速度、温度、高度和磁场强度。这个演示是为了展示,如何采用作为主器件的I2C驱动程序与其他I2C从器件通信。
在Cortex-M4的第二个终端仿真器中,您应该看到一些文字来显示“传感器示例正在运行”(如下所示)。选择一个传感器演示,并通过移动板或移动它附近的磁场东西来影响给定的传感器。
-------------- 板上的iMX7D SDB传感器示例 -------------- 请选择您要运行的传感器演示: [1].FXAS21002 3轴陀螺仪传感器 [2].FXOS8700 6轴加速度及磁力传感器 [3].MPL3115压力传感器
5.1 浏览文档
在使用嵌入式系统时,请务必记住文档的广泛性和多样性。有多种级别的文档很常见。i.MX7Dual Sabre板有一些文档。但该板的处理器是i.MX7Dual,它与SoC级文档一起归档。可用的BSP与BSP级别文档一起归档。
从下面的选项中进行选择,获取相关文档:
5.1.1 板文档
对于i.MX7Dual Sabre,提供以下文档。
表4. i.MX7Dual Sabre板相关文档列表
| 文档 | 描述 |
| Board Schematics [English] | i.MX7Dual Sabre电子原理图文件。 |
| i.MX7Dual Sabre硬件用户指南 | 本文档旨在帮助硬件工程师设计和测试基于imx7d系列处理器的设计。它提供有关板布局建议设计清单的信息,确保一次便可成功,还提供避免板启动问题的方法。它还提供有关板级测试和模拟的信息,例如使用BSDL进行板级测试,使用IBIS模型进行电气完整性模拟等。 |
5.2 Linux BSP的主要特性
借助i.MX板上运行的Linux,您可以评估i.MX SoC提供的特殊功能:本教程展示了下列演示的分步讲解。
从下面的选项中进行选择,获取详细指导:
5.2.1 电源管理
本示例显示如何挂起到低功耗模式并恢复正常操作。
- 输入下面的命令,启用串行TTY作为板的唤醒源:
# echo enabled > /sys/class/tty/ttymxc0/power/wakeup
- 输入下面的命令,进入Suspend-To-RAM模式:
# echo mem > /sys/power/statePM: Syncing filesystems ...冻结用户空间进程... (用时0.005秒)完成。冻结剩余的可冻结任务... (用时0.001秒)完成。挂起控制台(使用no_console_suspend进行调试) - 按键盘上的任意键来唤醒板。终端上应出现以下消息:
PM: suspend of devices complete after 637.926 msecsPM: suspend devices took 0.640 secondsPM: late suspend of devices complete after 1.966 msecsPM: noirq suspend of devices complete after 1.864 msecsDisabling non-boot CPUs ...PM: noirq resume of devices complete after 1.104 msecsPM: resume of devices complete after 99.689 msecsPM: resume devices took 0.110 secondsRestarting tasks ... done.
演示不能用?
您的板子是这样的包装吗?

没问题!您的板是旧封装,闪存存储器中预装了不同的开箱即用演示。
您将会看到红色和绿色LED指示灯来回切换。您准备就绪时,就可以进行下一步
仍然不能用?
试着按步骤继续操作,获得板上运行的其他示例应用。如果仍有问题,请通过恩智浦网络社区与我们联系。
采用Keil® MDK/µVision®运行演示 下载PDF
1. 安装CMSIS器件包
安装MDK工具后,必须安装Cortex®微控制器软件接口标准(CMSIS)器件包,才能从调试角度来说完全支持器件。这些器件包包括存储器映射信息、寄存器定义和闪存编程算法。按照这些步骤安装相应的CMSIS包。
-
打开名为µVision的MDK IDE。在IDE中,选择"Pack Installer"图标。

-
在对话框左侧出现的“Devices”选项卡中,展开“NXP”类别。然后,展开“KLxx Series”类别,并点击选中“KL4x”。

-
安装完成后,关闭Pack Installer窗口并返回到µVision IDE。
请注意:
这个流程需要互联网连接才能成功完成。

2. 构建平台库
这些步骤显示了如何在µVision中打开演示工作区、如何构建演示所需的平台库,以及如何构建演示应用。
-
使用此路径可找到演示区文件:
/examples/frdmkl46z/demo_apps/ /mdk 此演示区文件命名为
.uvmpw。在这个具体示例中,实际路径为: /examples/frdmkl46z/demo_apps/hello_world/mdk/hello_world.uvmpw 演示区打开后,显示两个项目:一个用于KSDK平台库,一个用于演示。默认情况下,演示项目被选为活动项目。

-
将平台库项目选为活动项目,因为该库是构建演示应用所需的要素。要将平台库项目选为活动项目,右击并选择"Set as Active Project"。活动项目的项目名带有黑框。平台库项目成为活动项目后,会突出显示。

-
每个KSDK项目支持两种项目配置(构建目标):
- 调试 — 编译器优化设置为低,生成可执行文件的调试信息。选择此目标是为了开发和调试。
- 释放 — 编译器优化设置为高,不生成调试信息。选择此目标是为了最终应用部署。
此工具用于根据活动项目选择构建目标,因此,要更改平台库的配置,平台库必须是活动项目。选择适当的构建目标:从下拉菜单中选择"Debug"或"Release"。
在这个示例中,选择"ksdk_platform_lib Debug"配置。

-
左击"Rebuild"按钮,重建项目文件,用红色突出显示。

3. 构建演示应用
KSDK演示应用基于前面构建的Kinetis SDK平台库中提供的软件构件来构建。如果平台库不存在,链接器将显示一个错误,表示无法找到该库。如果平台库二进制没有构建或不存在,可以按照第2页的步骤构建。否则,继续以下步骤来构建所需的演示应用。
-
如果还未完成,在以下路径中打开所需的演示应用工作区:
/examples/frdmkl46z/demo_apps/ /mdk The workspace file is named
.uvmpw, so for this specific example, the actual path is: /examples/frdmkl46z/demo_apps/hello_world/iar/hello_world.uvmpw -
使演示成为活动项目。

-
要构建演示项目,请选择"Rebuild"按钮,用红色突出显示。

-
构建将完成,并且不会报错。
4. 运行演示应用
FRDM-KL46Z板出厂时预装了mbed/CMSIS-DAP调试接口。如果您已经更改了板上的调试OpenSDA应用,请访问http://www.nxp.com/opensda了解如何更新板或将板恢复到出厂状态。
-
通过板上"SDAUSB" USB端口和PC USB接头之间的USB线缆,将开发平台连接到PC。
-
打开PC上的终端应用(如PuTTY或Tera Term),并连接到您之前确定的调试COM端口。采用以下设置配置终端:
- 波特率为115200
- 无奇偶校验
- 数据位为8
- 停止位为1
-
应用构建完成后,点击"Download"按钮,将应用下载到目标。

-
点击"Download"按钮后,此应用下载到目标并开始运行。如需调试应用,请点击"Start/Stop Debug Session"按钮,用红色突出显示。

-
单击"Run"按钮运行代码,以启用应用。

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。

采用Kinetis Design Studio IDE运行演示下载PDF
1. 安装Eclipse更新
使用带KSDK的KDS IDE之前,必须应用KSDK Eclipse更新。没有此更新,Eclipse就无法生成KSDK兼容项目。
Windows和Mac®操作系统用户
Mac操作系统所需的步骤与Windows的是相同的,唯一不同的是,IDE看起来略有不同。
-
安装KDS后,检查可用的更新。仅安装来自恩智浦的Processor Expert 3.0.1更新 - 不要安装任何其他更新。要检查更新,选择 “Help” -> “Check for Updates”。

-
选择"Help" -> "Install New Software"。

-
在Install New Software对话框中,点击右上角的"Add"按钮。然后,在Add Repository对话框中,选择"Archive"按钮。

-
在Repository存档对话框中,浏览KSDK安装目录
-
Enter the
/tools/eclipse_update folder and select the KSDK__Eclipse_Update.zip file. -
点击"Open",然后点击Add Repository对话框中的"OK"按钮。
-
KSDK更新将显示在原安装对话列表中

-
勾选KSDK Eclipse更新左侧的方框,并点击右下角的"Next"按钮。
-
按照其余指令完成更新安装。
-
应用更新后,重启KDS以使更改生效。
Linux®操作系统用户
使用Ubuntu 14.04执行以下指令。这些步骤可能与其他Linux分布略有不同。
-
作为根用户从命令行中启动KDS IDE。在命令行中,使用此命令,假定默认KDS IDE安装路径如下:
user@ubuntu:~$ sudo /opt/NXP/KDS_x.x.x/eclipse/kinetis-design-studioKDS IDE版本(如上所示为x.x.x)应当反映计算机上安装的版本,例如3.0.0版本。
-
提示您输入根密码。
-
安装KDS后,检查可用的更新。仅安装来自恩智浦的Processor Expert 3.0.1更新 - 不要安装任何其他更新。要检查更新,选择 “Help” -> “Check for Updates”。

-
选择"Help" -> "Install New Software"

-
在Install New Software对话框中,点击右上角的"Add"按钮添加。然后,在Add Repository对话框中,选择"Archive"存档。

-
在Repository存档对话框中,浏览KSDK安装目录。
-
Enter the
/tools/eclipse_update folder and select the KSDK__Eclipse_Update.zip file. -
点击"Open",然后点击Add Repository对话框中的"OK"。
-
KSDK更新将显示在原安装对话列表中。

-
勾选KSDK Eclipse更新左侧的方框,并点击右下角的"Next"按钮。
-
按照其余指令完成更新安装。
-
应用更新后,重启KDS IDE以使更改生效。
-
KDS IDE重启后,关闭IDE;然后启动KDS IDE,作为非根用户来重启IDE。为了实现重启,按照步骤1中的命令操作,但无需执行"sudo"命令。
2. 构建平台库
以下步骤显示如何在KDS IDE中打开并构建平台库。该演示需要平台库,否则将无法构建。
注:
Linux和Mac操作系统所需的步骤与Windows相同。
-
从KDS IDE菜单选择"File->Import"。在显示的窗口中,展开"General"文件夹并选择"Existing Projects into Workspace"。然后,点击"Next"按钮。

-
点击"Select root directory:"选项旁边的"Browse"按钮浏览。

-
为相应器件指出平台库项目,可使用此路径寻找:
/lib/ksdk_platform_lib/kds/KL46Z4 -
指向正确目录后,您的"Import Projects"窗口显示如下图 。点击"Finish"按钮完成。

-
每个KSDK项目支持两种项目配置(构建目标):
- 调试 — 编译器优化设置为低,生成可执行文件的调试信息。选择此目标是为了开发和调试。
- 释放 — 编译器优化设置为高,不生成调试信息。选择此目标是为了最终应用部署。
-
选择适当的构建目标,"Debug"或"Release",方法是点击锤子图标旁的向下箭头,如下所示。在这个示例中,选择"Debug"目标。

-
选择构建目标后,平台库开始构建。未来重建该库时,只需点击锤子图标(假定会选择同一构建目标)。
4. 运行演示应用
注:
Linux和Mac操作系统所需的步骤与Windows相同。
FRDM-KL46Z板出厂时预装了mbed/CMSIS-DAP调试接口。如果您已经更改了板上的调试OpenSDA应用,请访问http://www.nxp.com/opensda了解如何更新板或将板恢复到出厂状态。
Mac用户必须安装J-Link OpenSDA应用,才能使用KDS IDE下载并调试板。
-
通过板上"SDAUSB" USB端口和PC USB接头之间的USB线缆,将开发平台连接到PC。
-
打开PC上的终端应用(如PuTTY或Tera Term),并连接到您之前确定的调试COM端口。采用以下设置配置终端:
- 波特率为115200
- 无奇偶校验
- 数据位为8
- 停止位为1
-
以下命令仅适用于Linux操作系统用户,在终端运行。根据KDS IDE所需,将libudev安装到您的系统,以便启动调试器。
user@ubuntu:~$ sudo apt-get install libudev-dev libudev1user@ubuntu:~$ sudo ln —s /usr/lib/x86_64-linux-gnu/libudev.so /usr/lib/x86_64-linux-gnu/libudev.so.0 -
确保调试器配置与您想要连接的目标相符。查询附录B,了解关于KSDK支持的各种硬件平台上的默认调试器应用的更多信息。
-
为了查看可用的调试器配置,点击绿色"Debug"按钮旁向下的小箭头,并选择"Debug Configurations"。

-
在Debug Configurations对话框中,选择与您正在使用的硬件平台对应的调试配置。对于Windows或Linux用户,选择OpenOCD下的CMSIS-DAP/DAPLink选项。对于Mac用户,选择J-Link。
选择调试器接口后,点击"Debug"按钮启动调试器。

-
-
此应用下载到目标并自动运行到main()函数:

-
点击"Resume"按钮启动应用:

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。

制造工具教程 - Android™系统
- 采用USB线缆连接运行Windows操作系统的电脑与板上的USB OTG端口。
- 解压mfgtools.tar.gz文件至选定位置。在这个示例中,目录命名为MFGTool-Dir。
- 复制BSP镜像到此路径: MFGTool-Dir/Profiles/Linux/OS Firmware/files/android/sabresd
- 没有专用DIP启动开关预留给i.MX 6 Quad/QuadPlus SABRE-SD板的串行下载模式。一个方法就是将SABRE-SD SW6 (启动)更改为00001100 (1-8位),以进入下载模式。
- 打开板电源。
- 根据目标器件,双击*.vbs文件。
- 单击"Start"来启动下载。状态条表示下载状态。下载可能花费一到两分钟,具体取决于主机。
- 镜像下载完成后,根据下一步中的表格,设置启动开关来启动板。
如需详情,请参考i.MX Android™快速入门指南“3.3 下载板镜像”
您可以采用USB线缆连接调试UART端口和电脑,并打开串行通信程序进行控制台输出。

制造工具教程 - Linux®系统
- 采用USB线缆连接电脑与板上的USB OTG端口。
- 没有专用的DIP启动开关预留给i.MX 6 Quad/QuadPlus SABRE-SD板上的串行下载模式。
一个方法就是设置启动模式从SD插槽SD3中启动,但不插入SD卡,并接通板电源。显示"HID Compliant device (HID兼容器件)"消息后,板进入串行下载模式。然后将SD卡插入SD插槽SD3。参见i.MX Linux®用户指南中“4.5.11 制造工具的串行下载模式”。 - 打开板电源。
- 根据目标器件选择正确*.vbs文件。制造工具会自动根据器件调出所需的文件。“制造工具”的默认配置文件假设,采用bzip2算法打包并压缩您的文件系统。您还可以修改此配置文件来支持其他格式。
- 镜像下载完成后,设置启动开关来启动板。参见本“快速入门教程”的第2部分或本文“如何启动i.MX板”部分中的下一步。
如需了解详情,请参阅i.MX Linux®用户指南“4.2制造工具”。
您可以采用USB线缆连接调试UART端口和电脑,并打开串行通信程序进行控制台输出。
启动开关设置
i.MX板的启动模式由板上启动配置开关来控制。
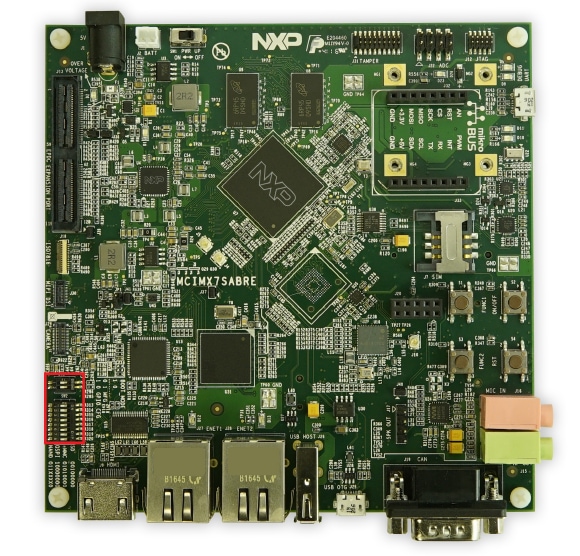
下表显示了DIP开关设置(在启动过程中优先),以便从i.MX7Dual Sabre板上标有SD1/J6的SD卡插槽来启动。
表1. 从i.MX7Dual Sabre-SD上的SD1/J6进行启动
| Boot Media | SW2 [D1-D8] |
SW3 [D1-D2] |
|---|---|---|
SD card (SD1) |
00100000 | 10 |
| eMMC | 01010000 | 10 |
| NAND | 011XXXX0 | 10 |
| QuadSPI | 10000000 | 10 |
| SDP | XXXXXXXX | 01 |