MCSPTE1AK344快速入门

获取软件
按照下面的分步指南设置MCSPTE1AK344电机控制套件:
2.1 下载开发套件——应用软件
软件包包含用于大多数典型硬件配置的项目。
注:安装过程将要求您下载最新版本的汽车数学和电机控制库(AMMCLib)集。

2.2 获取集成开发环境(IDE)
下载并安装S32 Design Studio IDE for S32 Platform 3.4版。
注:您将通过电子邮件收到激活码。
注:版本3.4位于“上一步”选项卡上。
2.3 安装S32K3xx开发包
从顶部菜单转到Help > S32DS Extensions and Updates(帮助>S32DS扩展和更新),打开“S32DS扩展和更新”。找到并安装S32K3xx开发包。
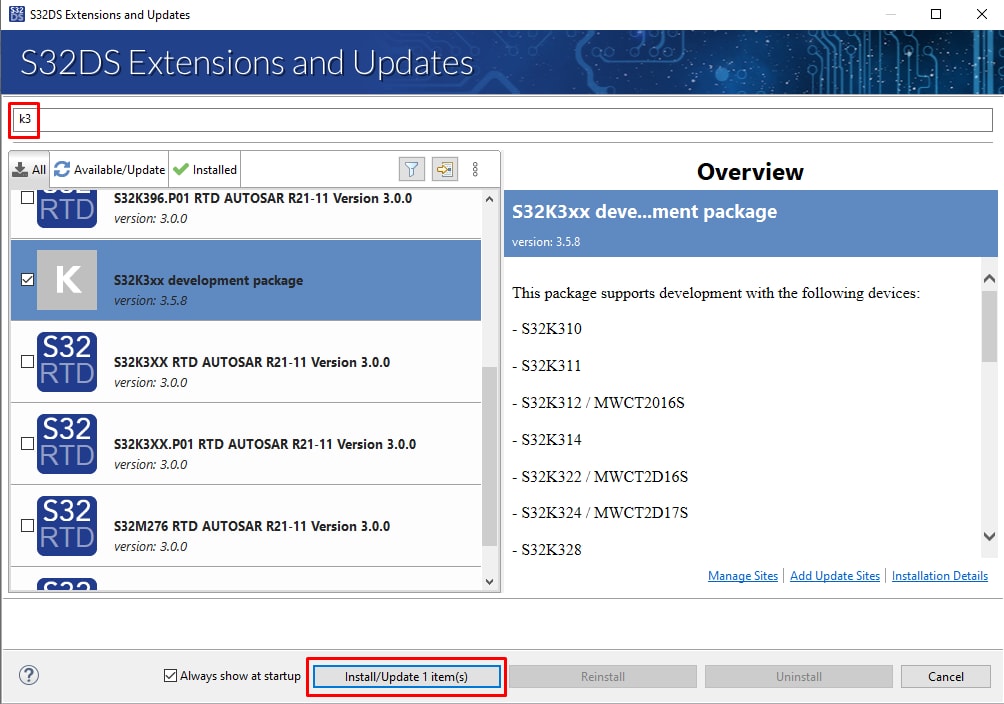
注:如果出现安装问题,请确保安装了最新版本的S32 Design Studio平台包和S32 Design Studio平台工具包。
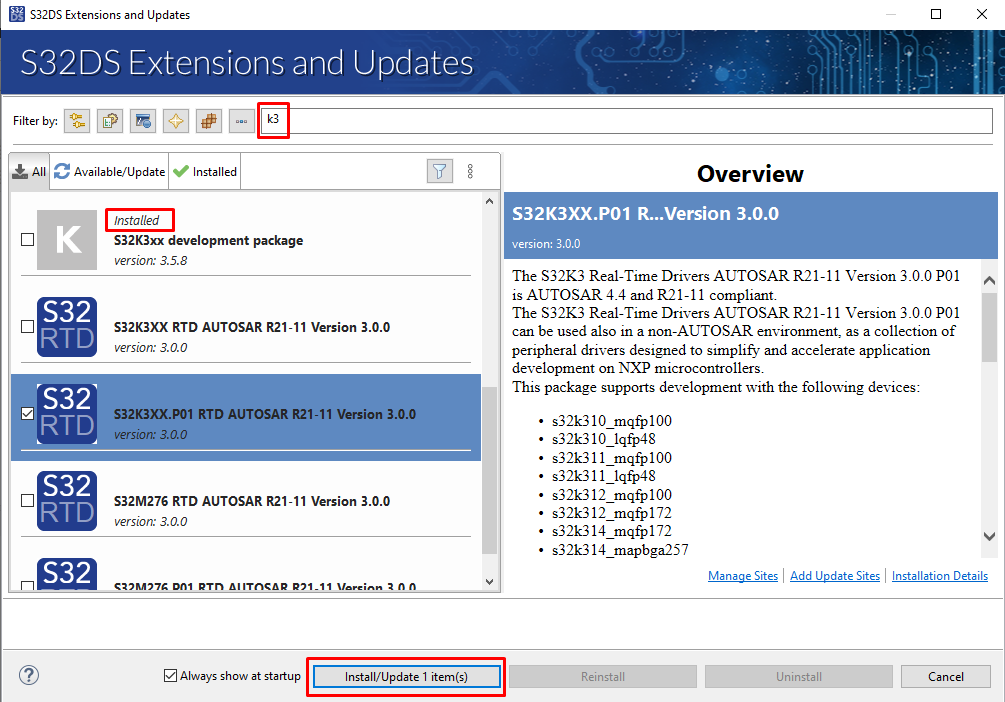
继续安装S32K3的实时驱动程序:
2.4 下载并安装Elektrobit Tresos Studio和实时驱动程序
下载并安装S32K3标准软件包的Elektrobit tresos Studio / AUTOSAR配置工具。
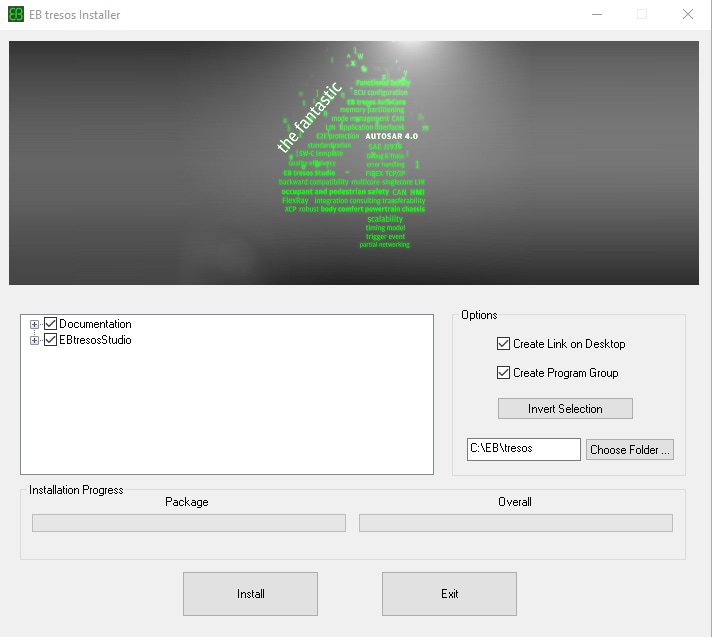
下载并安装S32K3标准软件包中Cortex-M的S32K3实时驱动程序的.exe文件。
安装程序将询问您磁盘上的EB Tresos安装目录,节省配置时间。
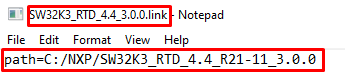
注:您将通过电子邮件收到激活码。如果您在EB-Tresos之前安装了RTD,请在以下位置创建SW32K3_RTD_4.4_x.y.z.link文件:
C:\EB\tresos\links文件夹,内容为:"path=C:/NXP/SW32K3_RTD_4.4_x.y.z ",其中x、y、z表示已安装的RTD版本。
2.5 获取运行时调试工具
使用FreeMASTER运行时调试工具,MCSPTE1AK344性能更佳。
注:查看FreeMASTER页面获取最新版本。
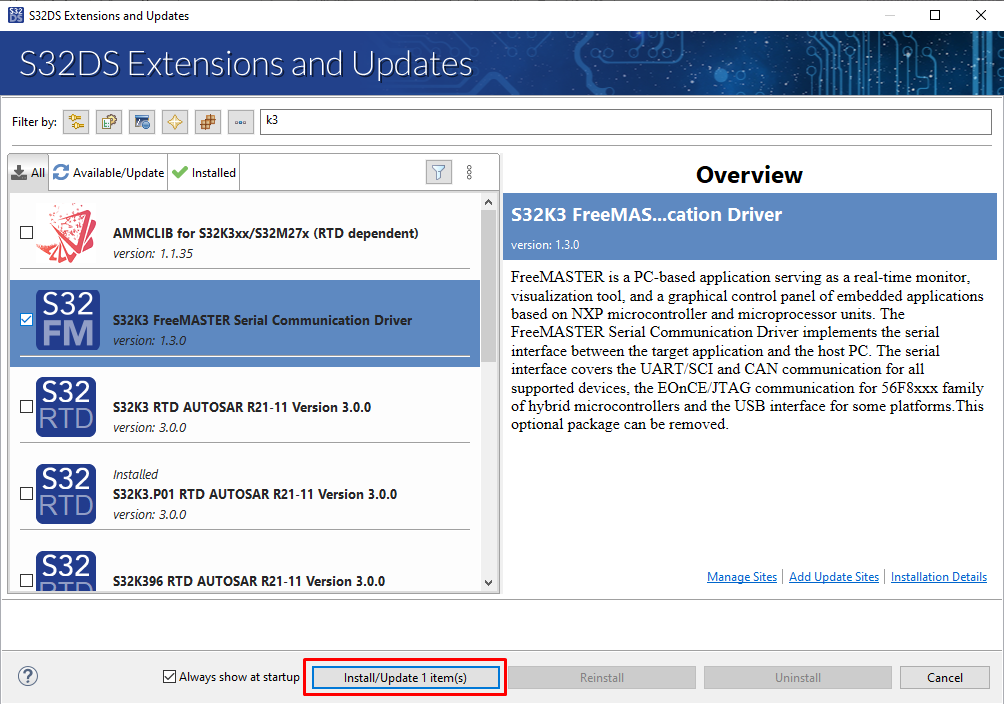
我们还需要用于S32K3微控制器的FreeMASTER通信驱动程序。可从S32K3标准软件包中的Automotive SW - S32K3 - S32 FreeMASTER链接下载此驱动程序。
打开“S32DS扩展和更新”对话框(菜单->帮助->S32DS扩展和更新),点击“添加更新站点”链接并导航到S32K3的FreeMASTER通信驱动程序(以“com”开头的zip文件)。
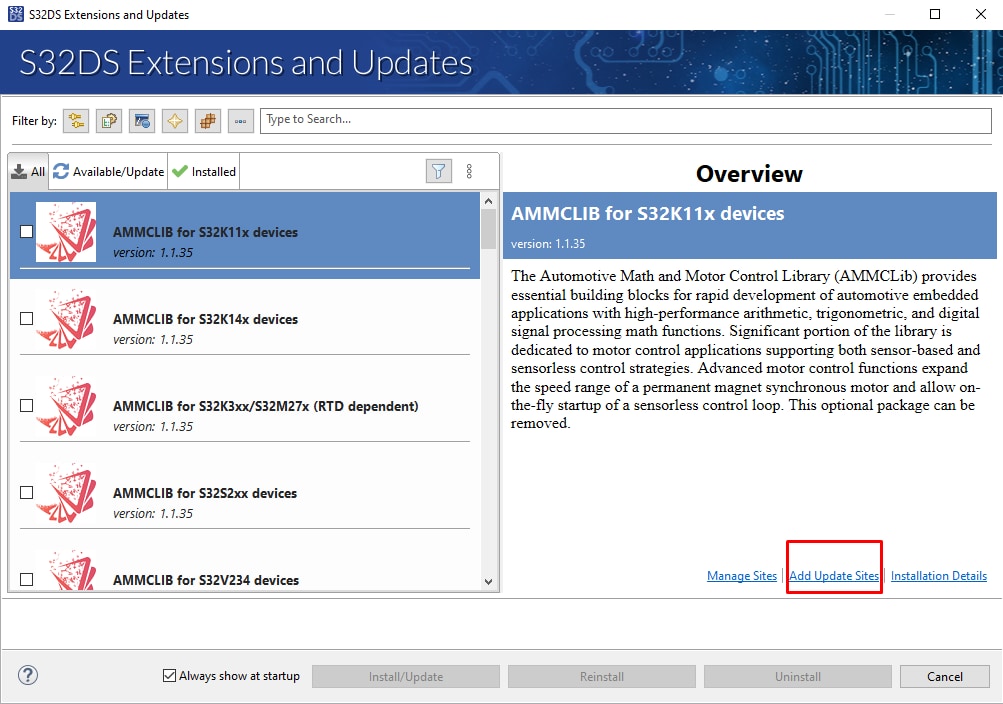
安装S32K3的FreeMASTER通信驱动程序。
连接
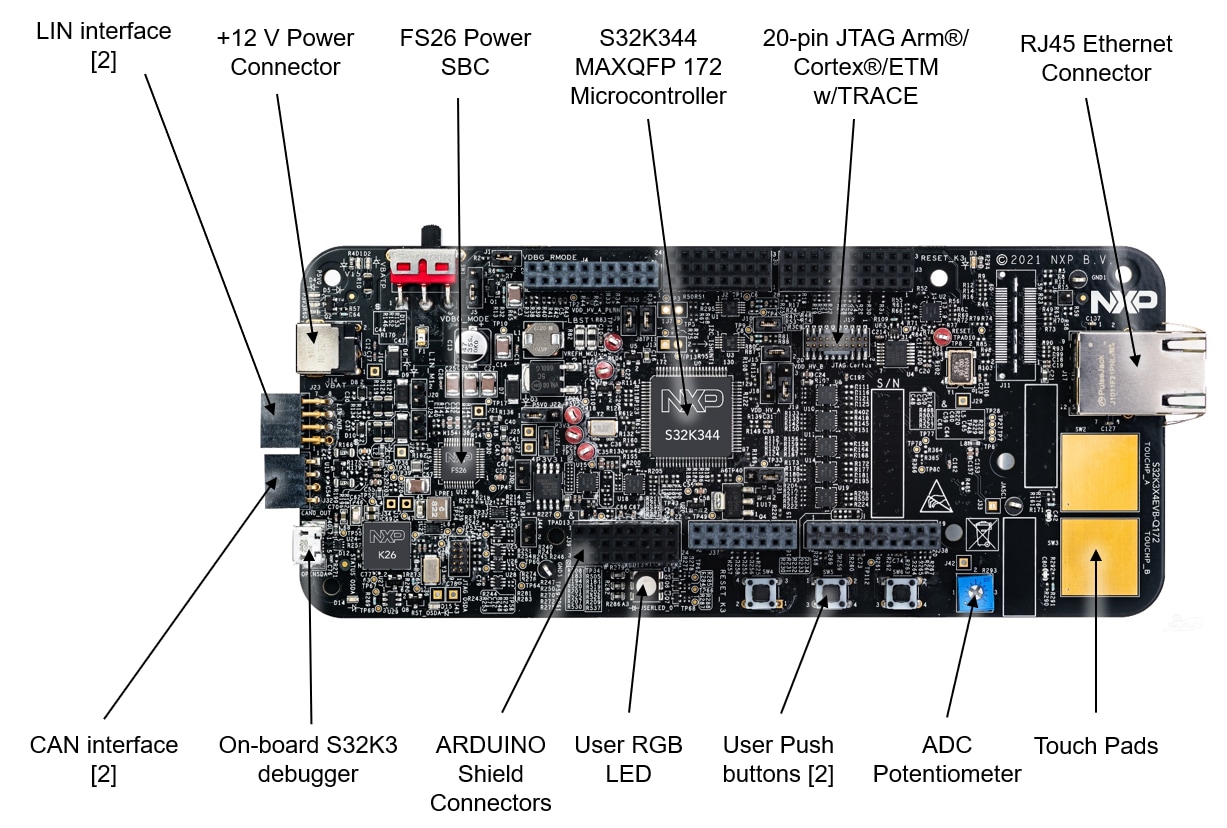
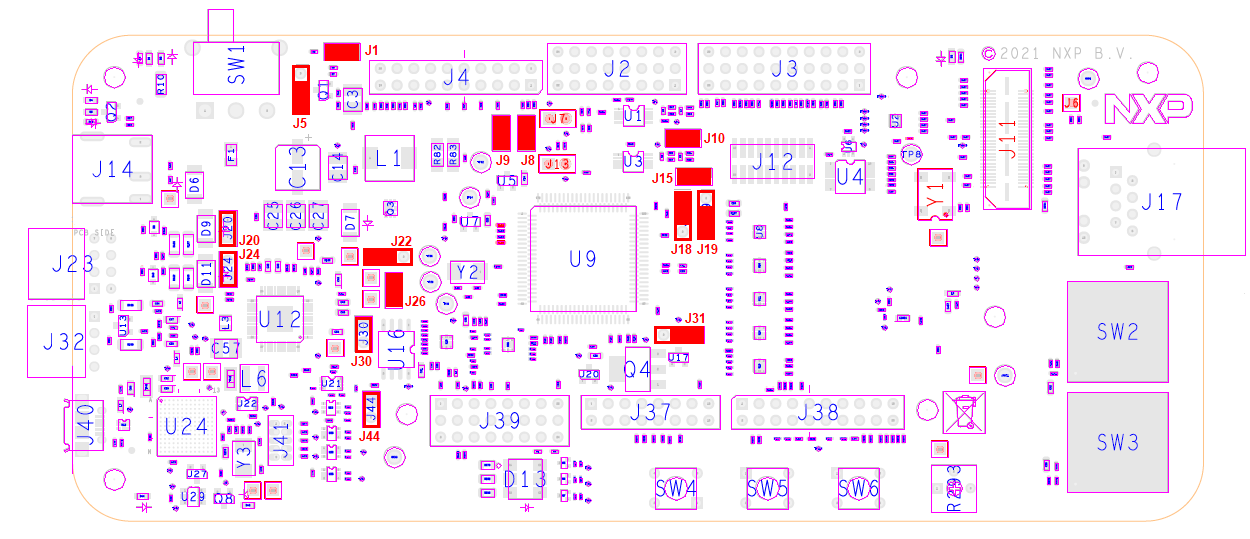
3.1检查S32K3X4EVB-Q172评估板中的默认跳线位置
| 默认跳线设置 | ||
|---|---|---|
| 跳线 | 状态 | 注意事项 |
J1 |
已关闭 | 上电后禁用FS26看门狗 |
J5 |
1-2 | 选择FS26 DEBUG引脚的电压电平 |
J8 |
已关闭 | 外部电路由VDD_HV_B域供电 |
J9 |
已关闭 | 外部电路由VDD_HV_A域供电 |
J10 |
已关闭 | MCU外设由VDD_HV_A域供电 |
J18 |
1-2 | VDD_HV_A域电压为5 V |
J20 |
打开 | LIN1 Commander*模式 |
J22 |
1-2 | FS26 SBC电压为5 V |
J24 |
打开 | LIN2 Commander*模式 |
J26 |
已关闭 | FS26 SBC电压为3.3 V |
J30 |
打开 | FS26唤醒输入 |
J44 |
打开 | 板载调试器UART引脚 |
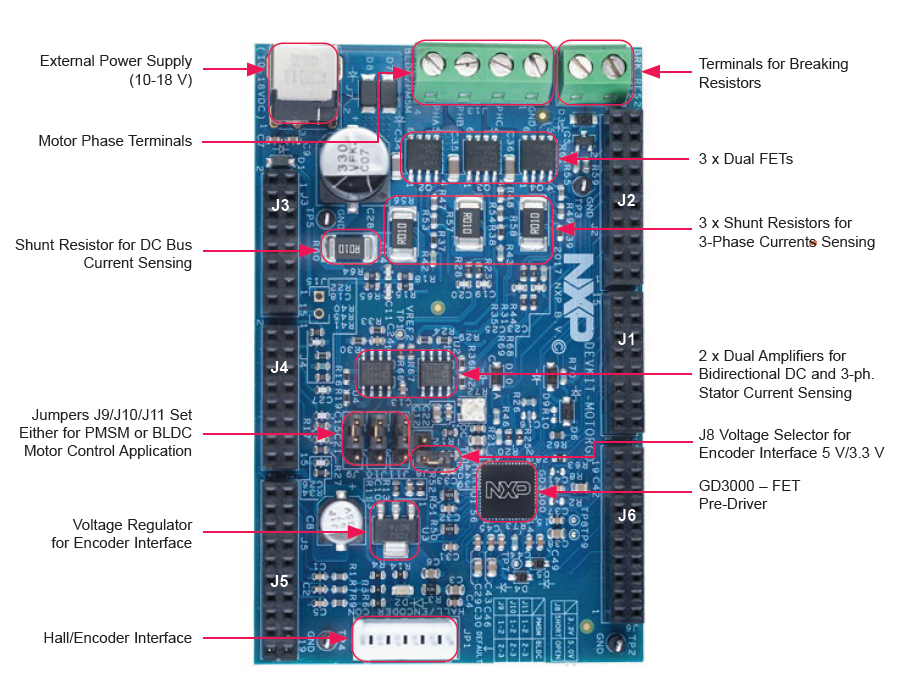
3.2 在DEVKIT-MOTORGD评估板上设置跳线
| 跳线 | 设置 | 选项 | 说明 |
|---|---|---|---|
J8 |
短路 | 霍尔/编码器接口 | 霍尔/编码器接口的电压电平为3.3V |
| 打开 | 霍尔/编码器接口的电压电平为5.0V(默认值) | ||
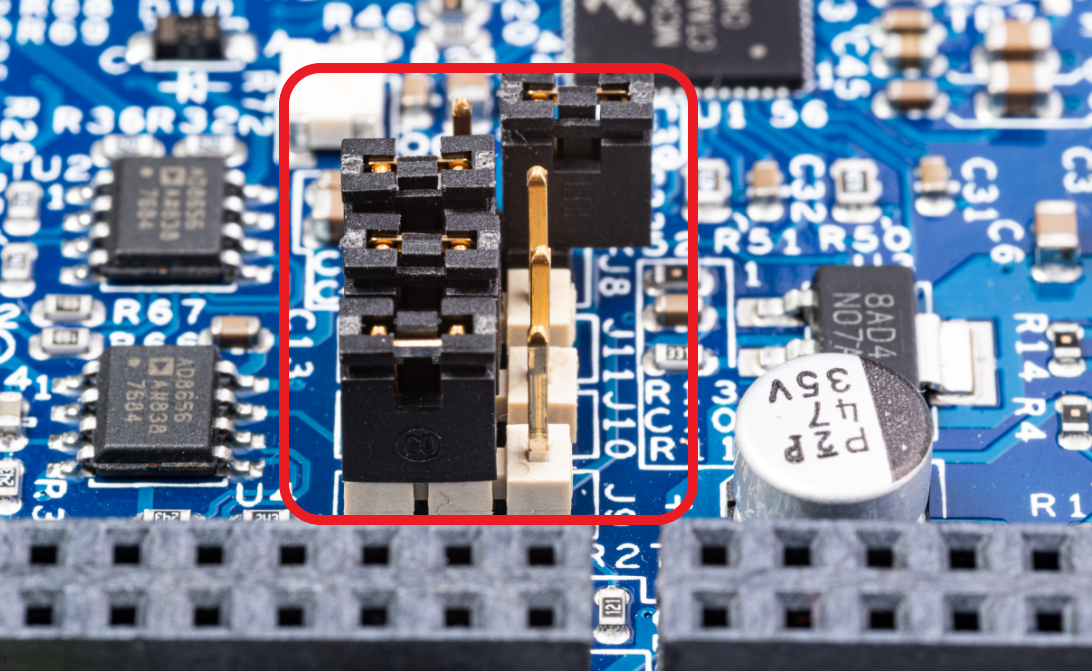
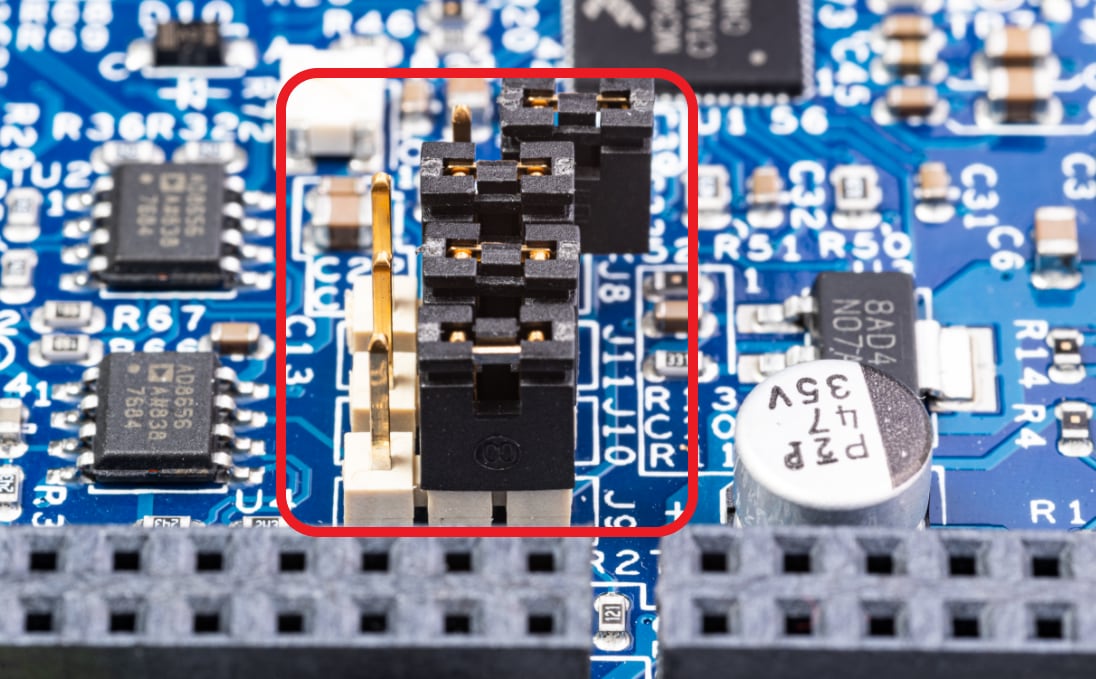
J9/J10/J11 |
1-2 | 电机类型 | 用于PMSM FOC(正弦波)电机控制的双向三相电流检测 |
| 2-3 | 三相反电动势电压感测,用于BLDC六步(梯形)无传感器电机控制 |
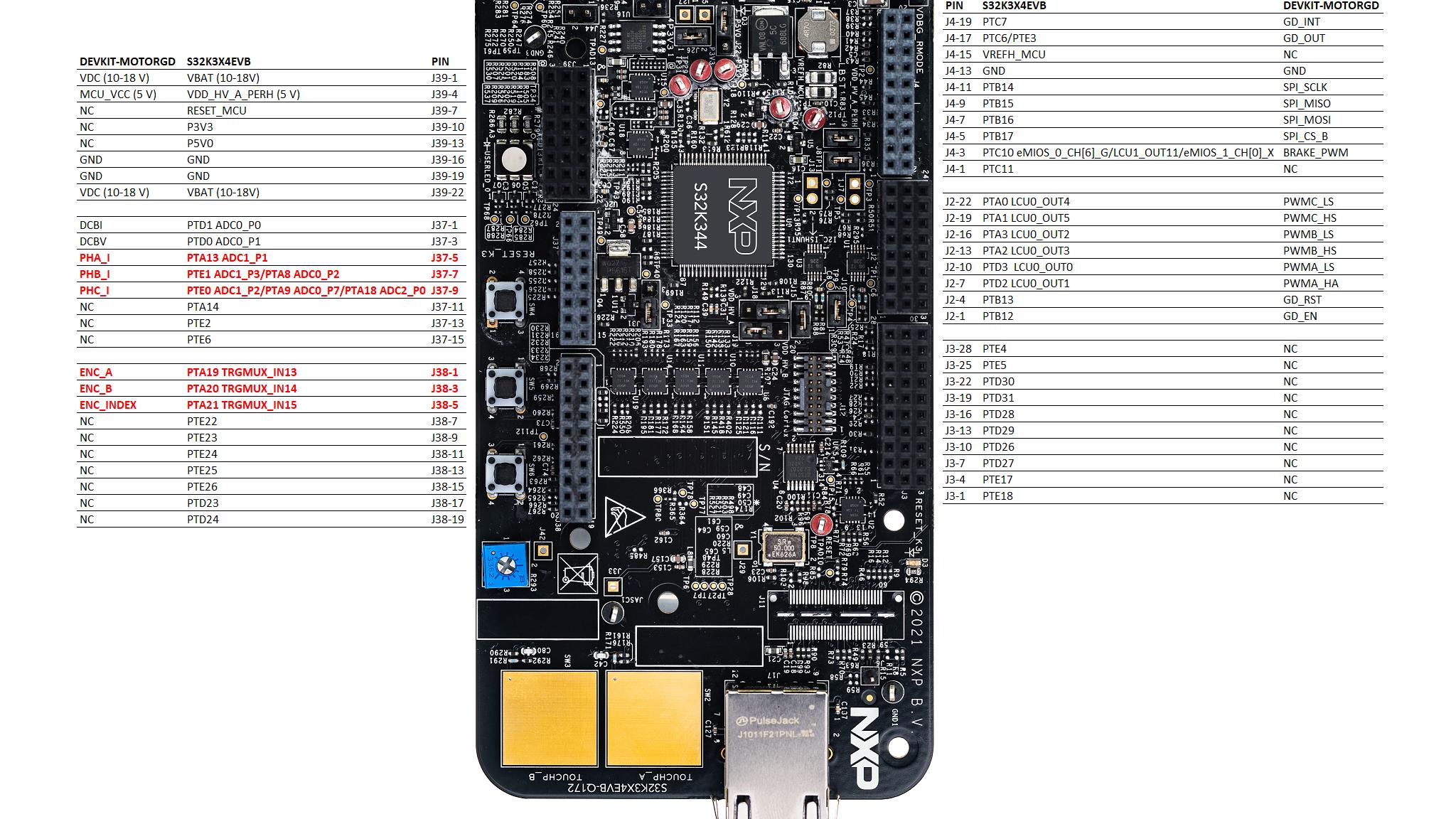
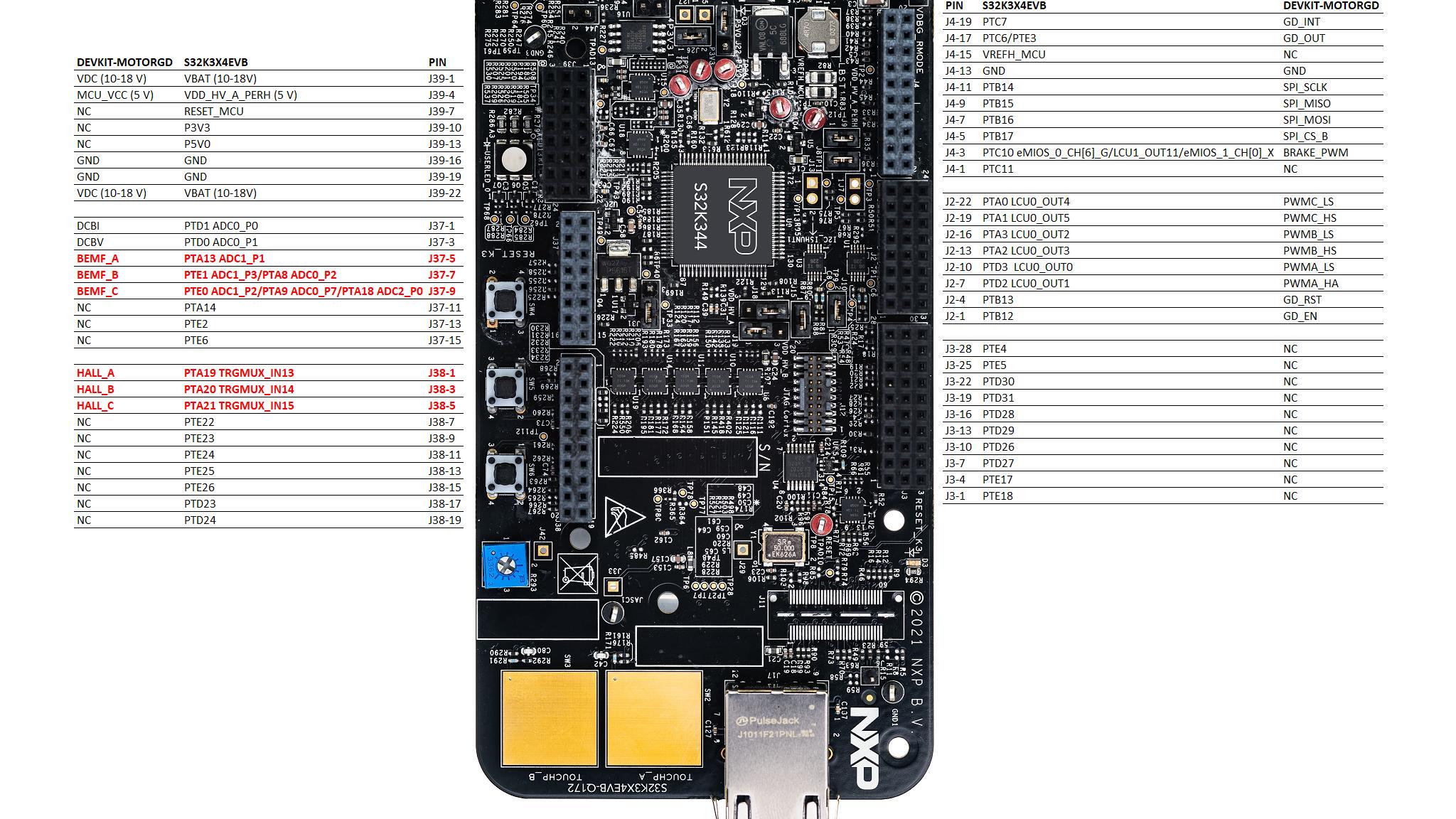
将DEVKIT-MOTORGD跳线J9、J10和J11放置在1-2位置(适用于PMSM应用)或2-3位置(适用于BLDC应用)。跳线J8对5V霍尔传感器保持开路。
PMSM
BLDC
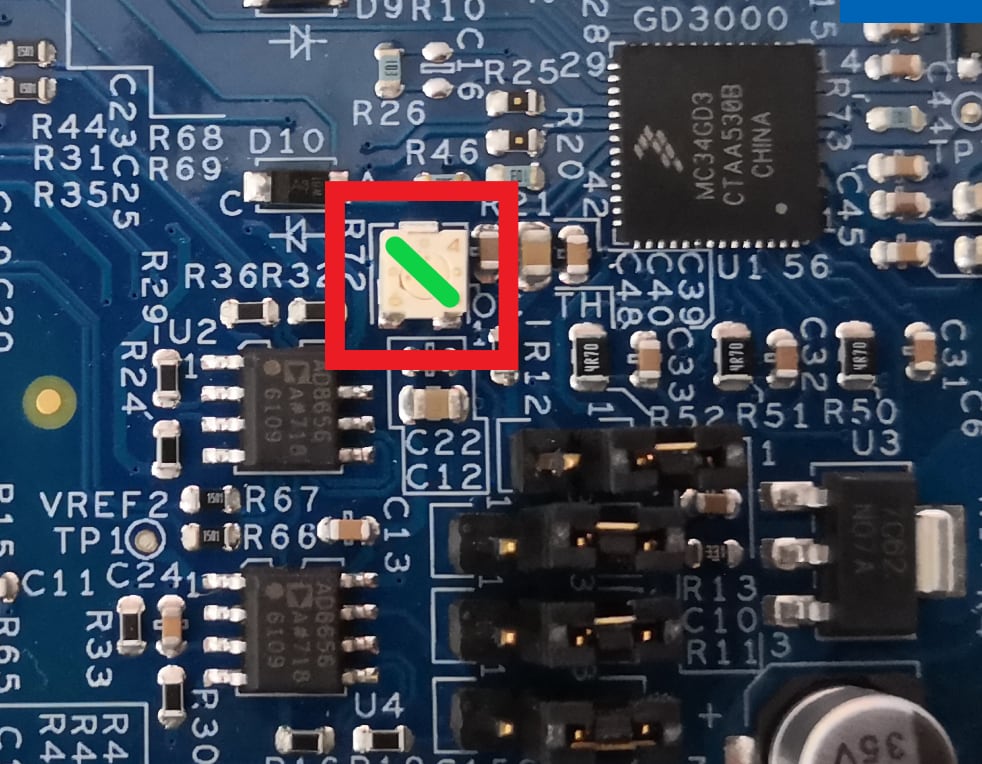
确保过电流比较器的电位计设置在适当位置(从中间稍微偏向左侧),约8–10 A位置。
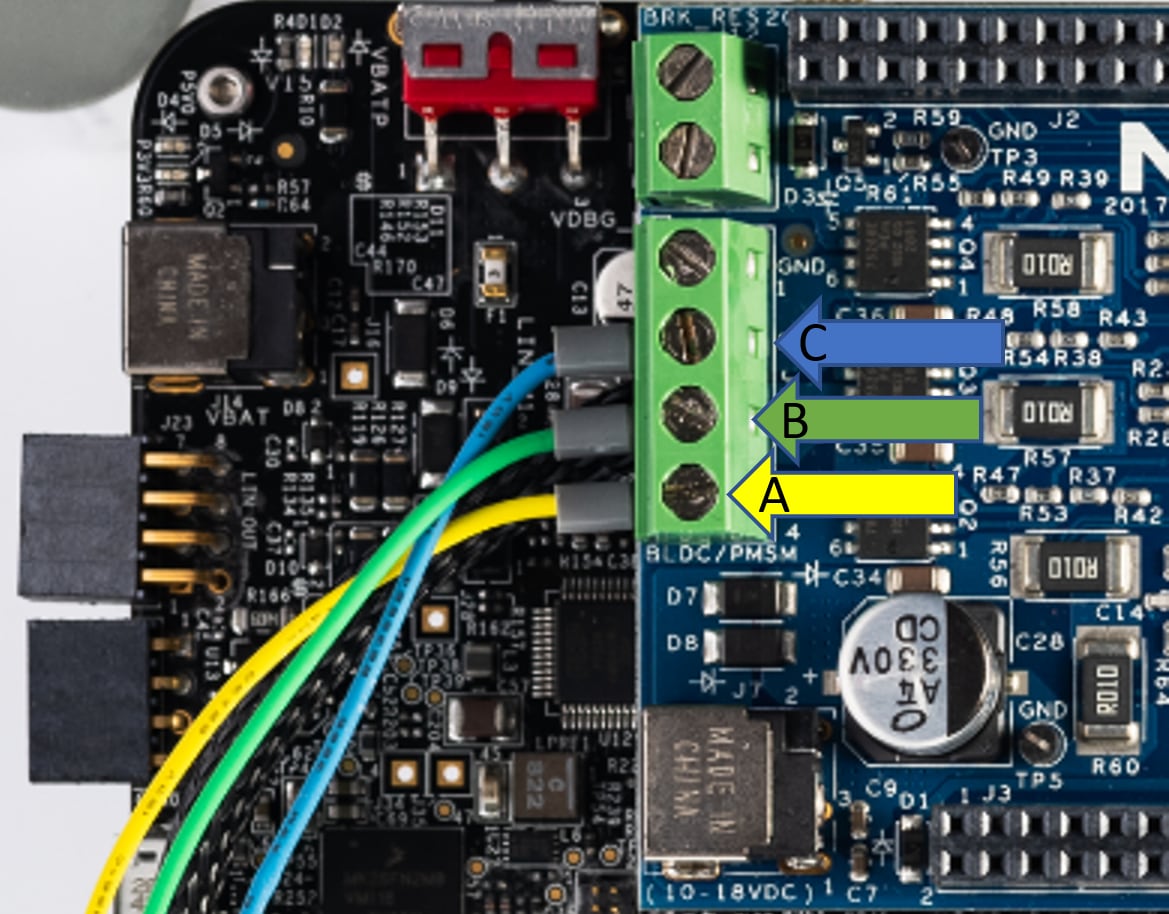
3.3 连接电机
确保电机相线按从A相到C相的以下顺序排列:
- A:黄线
- B:绿线
- C:蓝线
3.4 连接电源
将SW1切换到OFF位置(完全向左)。
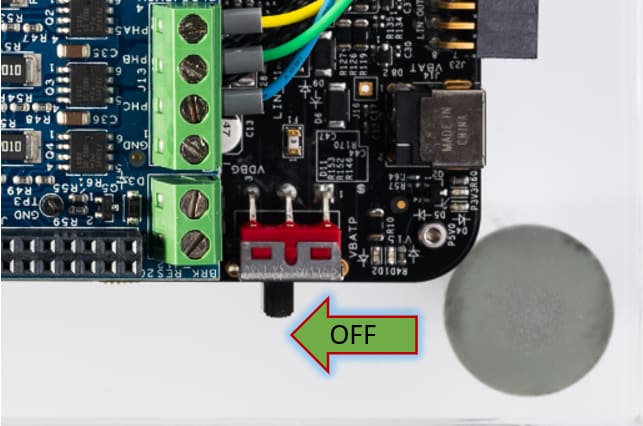
连接12 V电源适配器
并将SW1切换到“ON”位置(完全向右)。
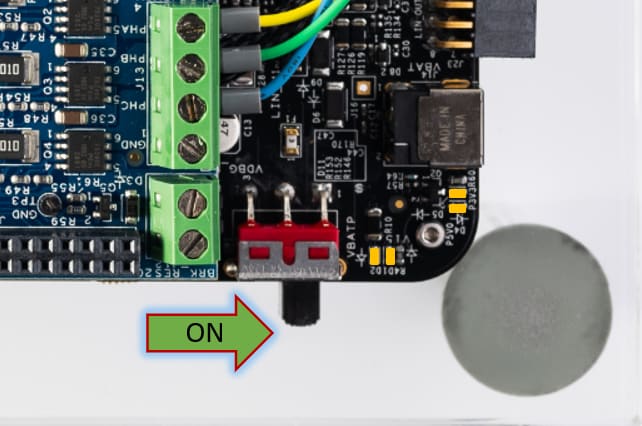
当EVB上电时,稳压器旁边的4个橙色LED显示存在电源电压(12 V、5 V、3.3 V和1.5 V)。
注:这个上电程序可管理FS26 SBC以禁用的看门狗启动。
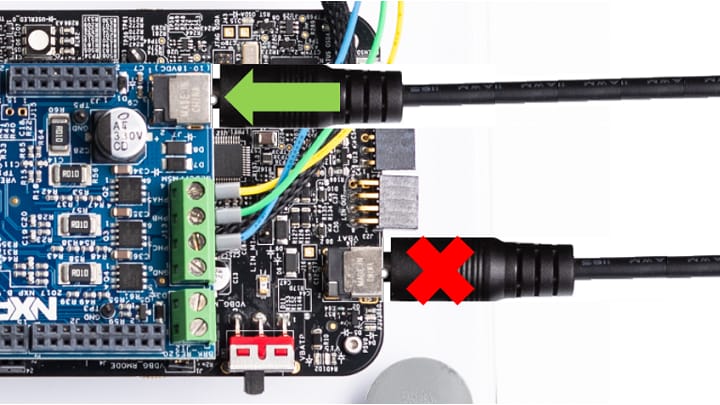
3.5 连接调试器线缆
将任一微型USB线缆连接到J40接头,通过板载S32K3调试器进行调试。

注:某些USB集线器在连接过程中可能会导致问题。请直接连接PC。
构建
让我们开始试用MCSPTE1AK344电机控制套件。
4.1 选择应用和MCU编程
从以下安装目录中选择适当的PMSM或BLDC电机控制应用。
NXP\MC_DevKits\MCSPTE1AK344\sw
在S32 Design Studio for S32 Platform中导入已安装的应用软件项目。
- 启动S32DS for S32 Platform
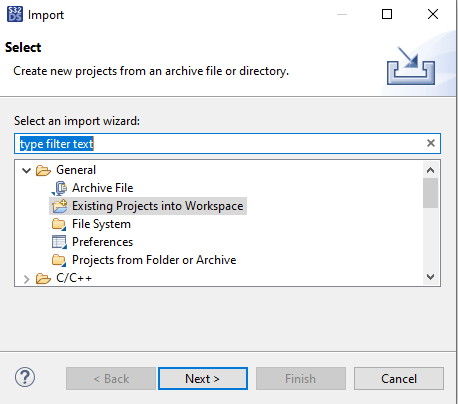
- 转到File > Import,然后选择General > Existing Projects into Workspace
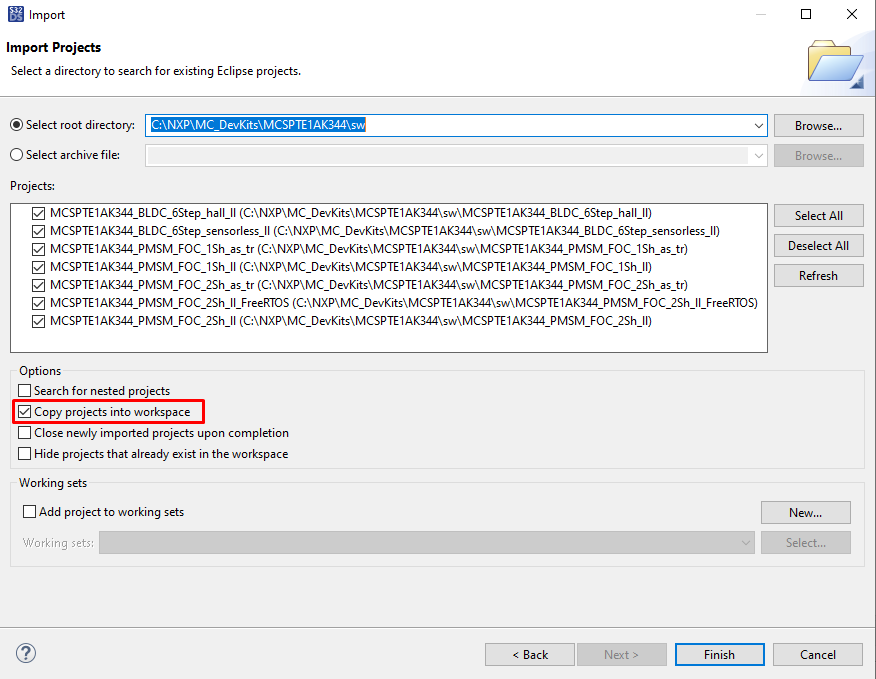
- 前往已安装应用目录:
NXP\MC_DevKits\MCSPTE1AK344\sw并选择适当的项目,然后点击OK(确定)。接着,点击Finish(完成)。
注:选中Copy projects into workspace(将项目复制到工作区)选项框。
4.2 使用配置工具
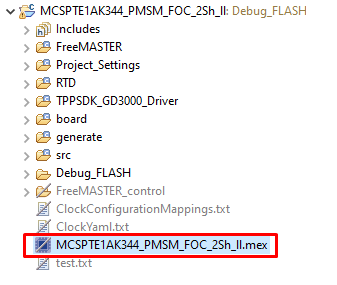
- 展开带有低级驱动程序的项目结构,双击*.mex文件打开Configuration Tool中的项目配置。
- 请确定您配置了适当的项目,然后点击"Update Code"(“更新代码”)按钮生成配置文件。
如果选择带有Autosar驱动程序的项目(项目名称中为as_tr),则S32DS项目包含带有EB tresos配置的Tresos文件夹。打开EB tresos Studio,导入相应的子文件夹
注:取消勾选Copy projects into workspace(将项目复制到工作区)选项框。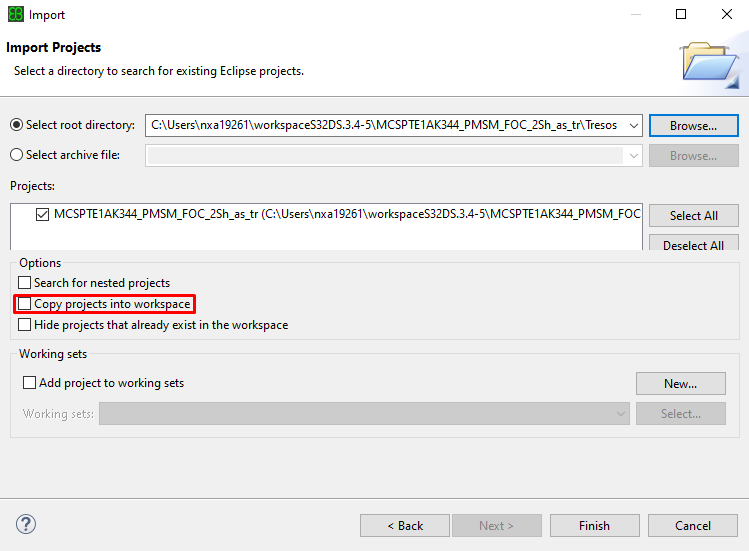
在EB tresos Studio中,双击ECU(CORTEXM, S32K3XX)并生成项目(菜单 — >项目 — >生成项目
4.3 上传软件和调试
在S32DS中,返回到C/C++透视图。
使用Debug Configuration(调试配置)菜单,选择一个预定义的调试配置,可构建软件并将其上传到MCU。
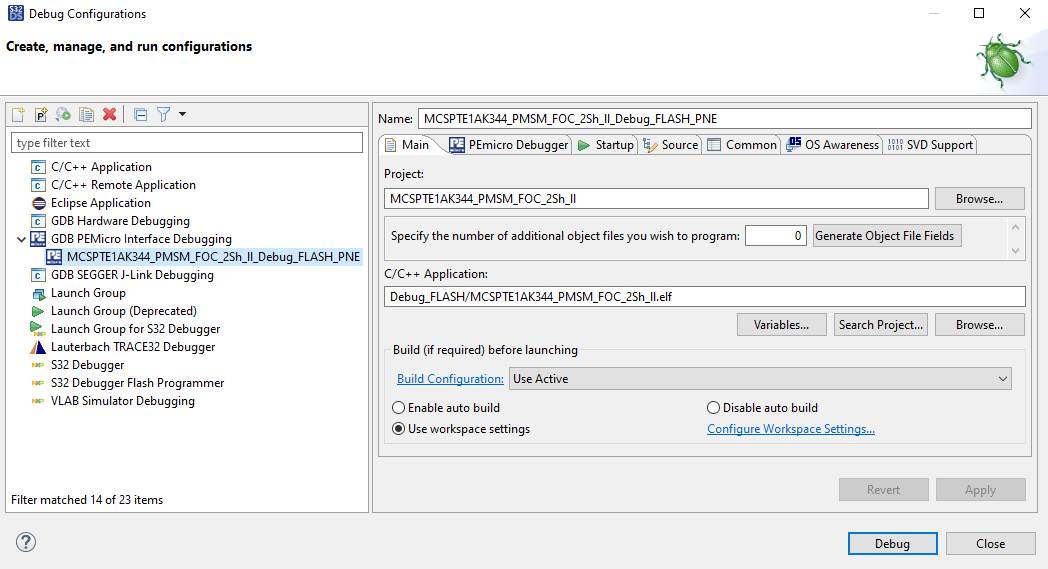
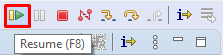
S32DS将切换到调试透视图,要使代码运行,请点击Resume(或按F8键),然后使用Disconnect,可避免S32DS IDE调试器和FreeMASTER工具之间的干扰。

4.4 设置调试工具
启动FreeMASTER应用。
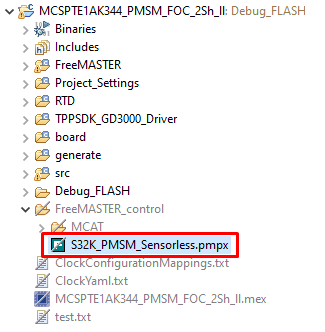
要打开*.pmp FreeMASTER project
注:也可以直接双击S32DS项目文件夹来启动它。
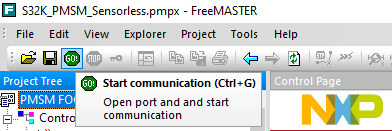
要启用通信,请在FreeMASTER工具栏中,点击Go(或按下Ctrl+G)。
在底部的状态栏中显示通信成功:RS232 UART Communication;COMn;speed = 115200
应用控制
点击“电机控制应用调优”(MCAT)工具菜单中的App Control(应用控制)选项卡,可显示应用控制页面。
配置电机转速并打开电机驱动器。
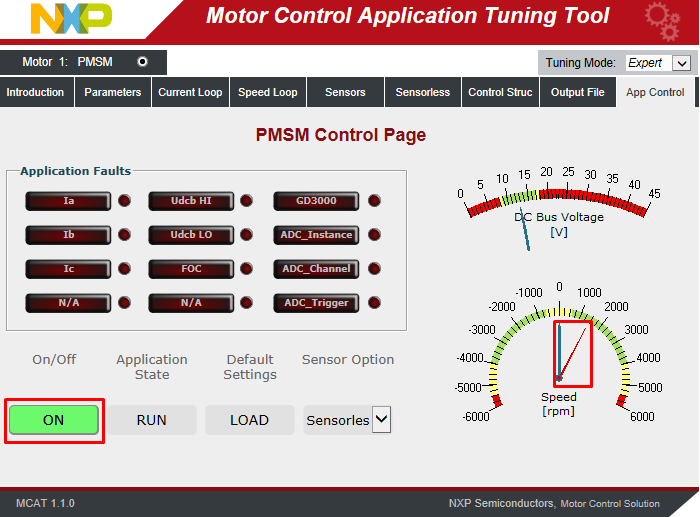
当DEVKIT-MOTOGD板通电时,该应用处于READY状态(绿色LED灯亮)。
检查未决故障
如果出现未决故障(红色LED灯亮),请点击FreeMASTER MCAT控制页面上的Clear FAULT(清除故障),或同时按住板上的SW5和SW6。
启动应用
点击控制页面上的ON/OFF或按下板上的SW5/SW6,启动转子的顺时针/逆时针旋转。
设置速度
要设置速度,请更改所需的速度变量。转到“Variable Watch(变量监视)”窗口,修改“Speed Required(目标速度)”变量,或点击速度表或按下开关SW5/SW6。
停止应用
点击FreeMASTER MCAT控制页面上的ON/OFF按钮,或同时按住S32K344EVB板上的SW5和SW6,可停止应用。
设计资源
板文档
- S32K3X4EVB-Q172评估板硬件用户手册
- 采用RTD低级API的S32K344三相无传感器PMSM控制套件应用笔记
- DEVKIT-MOTORGD布板文件
- 通用S32K3 MCU——硬件设计包
- DEVKIT-MOTORGD板——REV B2原理图
- DEVKIT-MOTORGD布板文件
- DEVKIT-MOTORGD BOM文件
芯片文档
- 基于S32K3MCU的电机控制解决方案:手册
- S32K3 Arm Cortex-M7汽车MCU:手册
- S32K3xx MCU系列—— 参考手册
- S32K3xxDS:S32K3xx MCU系列——数据手册
- 掩码0P55A/1P55A的掩码设置勘误表——勘误表
- MC33GD3000,三相场效应晶体管预驱动器——数据手册
- FS26:安全系统基础芯片(SBC),低功耗,满足ASIL D /ASIL B安全等级——产品简介
- 可用的功能安全文件:需要访问SafeAssure NDA组
软件
获取帮助
培训
论坛
在恩智浦的技术论坛网站上,可与其他工程师交流,获取专家建议,了解如何使用MCSPTE1AK344进行产品设计。