
连接!
让我们开始试用LPCXpresso804板您可以选择观看短片中的操作顺序或遵循下面列出的详细操作步骤。
LPCXpresso804开发平台快速入门 - 演示
1.1 安装驱动程序
在windows 7或8平台上,建议您在使用板之前安装VCOM设备驱动器。在此开始下载固件和驱动程序包
1.2 串行终端
一些为IAR和Keil工具设置的开箱即用演示和代码包UART示例使用MCU UART进行printf输出,这也是MCUXpresso IDE的一个选项。如果您不确定如何使用终端应用,请尝试下面一个教程:
1.3 连接板
LPCXpresso804板会随附电容式触摸Shield板,以便进行包装。通电之前,应将该Shield板移除,以便使用电位计(见下图)。注意:LPC804代码包中包含适用于该Shield板的示例程序。
LPCXpresso804板已预先使用诊断演示程序进行了编程,该程序会对板的各种功能进行测试。此程序利用与硬件调试器连接的UART LPC804输出,作为串行USB桥连接至主机(并提供CMSIS-DAP调试接口)。使用Windows 7或8主机时,为了确保操作正常,在为板通电前,请遵循步骤1.1来安装VCOM串行端口驱动器。
使用micro USB线缆将连接器CN2连接至主机或电源,以接通板的电源并运行演示程序。打开终端模拟器程序(例如Teraterm或PuTTY),查找采用 “NXP LPC11Uxx VCOM ...” 形式命名的端口,然后连接该端口。将该串行端口设置为采用9600波特、8位,无奇偶校验。
- 蓝色用户LED将闪烁3次,然后绿色LED闪烁3次,终端显示 “HelloWorld”,接着显示“Press key to start LED test ...”
- 按ISP按钮(S2)。绿色和蓝色用户LED将闪烁,然后每个LED轮流亮起两次,然后三个一起闪烁三次。终端将显示“DONE”。
- 终端将显示“Press key to start SpiFlash test”。按ISP按钮。测试期间,LED将闪烁,且SPI闪存设备的ID和名称都将显示在终端上。
- 终端将显示“Press key to start I2cTemperature test...”。按ISP按钮执行测试,此测试主要检查与LM75温度传感器之间的通信。
- 终端将显示“Press key to start ADC Potentiometer test...”。按ISP按钮执行测试。测试会检测LPC804 ADC和电位计(VR1),确认ADC读数是否会在采用6个样本(几秒钟)之后至少变化一次。您可以使用提供的螺丝刀来调整VR1,以便通过测试。
Tera Term教程
Tera Term是一款广受欢迎的开源终端仿真应用。此程序可用来显示从恩智浦开发平台的虚拟串行端口中发送的信息。
- 从SourceForge下载Tera Term。下载完成后,运行安装程序,然后返回到该页面继续操作。
- 启动Tera Term。首次启动时,会显示以下对话。选择串行选项。假设您已插入板,列表中会自动填充一个COM端口。
- 配置串行端口设置(使用之前确定的COM端口号),波特率为115200,数据位为8,无奇偶校验且停止位为1。要进行此操作,进入Setup -> Serial Port并更改设置。
- 确认连接已打开。如已连接,Tera Term将在标题栏中显示以下内容。
- 一切就绪


PuTTY教程
PuTTY是一款广受欢迎的终端仿真应用。此程序可用来显示从恩智浦开发平台的虚拟串行端口中发送的信息。
- 使用以下按钮下载PuTTY。下载完成后,运行安装程序,然后返回到该页面继续操作。
- 启动PuTTY,可双击下载的*.exe文件或从开始菜单启动,具体取决于您所选的下载类型。
- 配置在启动的窗口中,选择"Serial"单选按钮并输入您之前确定的COM端口号。还要输入波特率,在本例中,为115200。
- 点击“Open”,打开串行连接。假设板已连接,并已输入正确的COM端口,此终端窗口会打开。如果配置不正确,PuTTY将会发出提示。
- 一切就绪

2.1 采用代码包快速开始设计
LPC8xx系列代码包提供易于了解的驱动程序和示例,以及完整的源代码。
获取LPC81x的代码
获取LPC82x的代码
获取LPC83x的代码
获取LPC84X的代码
2.2 安装工具链
恩智浦提供名为MCUXpresso IDE、基于GNU/Eclipse的免费工具链 。注:MCUXpresso IDE 10.1.1需要采用补丁才能支持LPC804;此补丁可从IDE下载页面下载。

想使用其他工具链?

3.1 构建,运行
MCUXpresso IDE版本10.1或更新版本应与LPC804配合使用。提供一个补丁(可从MCUXpresso IDE页面下载),安装之后,将提供IDE以及LPC804产品系列的内置知识,因此无需采取任何SDK安装步骤。注意:版本10.1报告的LPC804存储器大小可能不正确,且不包含LPCXpresso804板的图片。从版本10.2 (2018年第2季度之后发布)开始,IDE不再需要补丁,且本身会包含该板的信息。
请按照以下步骤构建并运行恩智浦提供的LPC804代码包中的简单示例。可从以下网址下载,nxp.com:
获取LPC81x的代码
获取LPC82x的代码
获取LPC83x的代码
获取LPC84X的代码
1. 在IDE中打开一个新的演示工作区。
2. 在IDE的“快速入门”面板中,点击“从文件系统导入项目”。
3. 在打开的“从文件系统导入项目...”对话框中,点击项目存档(从zip)部分中的“浏览...”,然后在MCUXpresso IDE安装中,从代码包目录中选择LPC804代码包zip文件(或选择从nxp.com下载的版本,如上述步骤1中所述)。点击“从文件系统导入项目...”对话框中的“下一步>”继续。
4. 您将看到“代码包”中所列的几个项目; 点击“完成”将其全部导入。
5. 对话框将关闭,您将在IDE的左上角窗口的“项目”选项卡中看到导入的项目。点击Example_Multi_Timer_Blinky进行选择,然后从“快速入门”面板中选择“构建”。您将在“快速入门”面板右侧的“控制台”窗口中看到构建处理。这些项目被设置为包括相关性检查,因此构建过程将自动构建实用程序和外设库以及示例程序。
6. 确保将LPCXpresso804连接到主机,点击“快速入门”面板中的“调试”。IDE将搜索可用的硬件调试器。选择您的板显示的硬件调试器,然后点击确定。请注意,IDE将在您下次调试此项目时记住您的选择,因此除非找不到该板,否则不会再提示。
7. 代码将执行到main。按F8键恢复运行程序。您现在将看到用户LED发亮,依次呈现每种颜色。
采用MCUXpresso IDE进行构建和调试
下面的视频展示了如何使用MCUXpresso IDE来加载和运行代码包程序。视频以LPCXpresso845板为例;其步骤与LPCXpresso804相同,但确保使用面向LPC804的代码包,而不是面向LPC845的代码包。
OM40001板组件包含PLU和电容式触摸Shield板,它们安装在LPCXpresso804板之上。LPC804的代码包中包含其使用方法示例。参考OM40001用户手册了解更多与这些shield板有关的信息。
演示不能用?
您的板是这样的包装吗?

没问题。您的板是旧封装,闪存存储器中预装了不同的开箱即用演示。
您会看到RGB LED灯在红、蓝和绿三种颜色之间依次切换。您准备就绪时,可以进行下一步。
仍然不能用?
试着按步骤继续操作,获得板上运行的其他示例应用。如果仍有问题,请通过恩智浦网络社区与我们联系。
采用IAR运行演示
1. 构建示例应用
以下步骤将指导您运行led_output应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
-
如果还未完成,在以下路径中打开所需应用的示例应用工作区:大多数示例应用工作区文件位于以下路径:
/boards/ / / /iar 以hello_world演示为例,路径为:
/boards/lpcxpresso54608/driver_examples/gpio/led_output/iar -
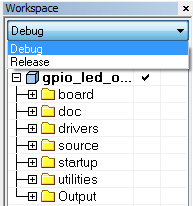
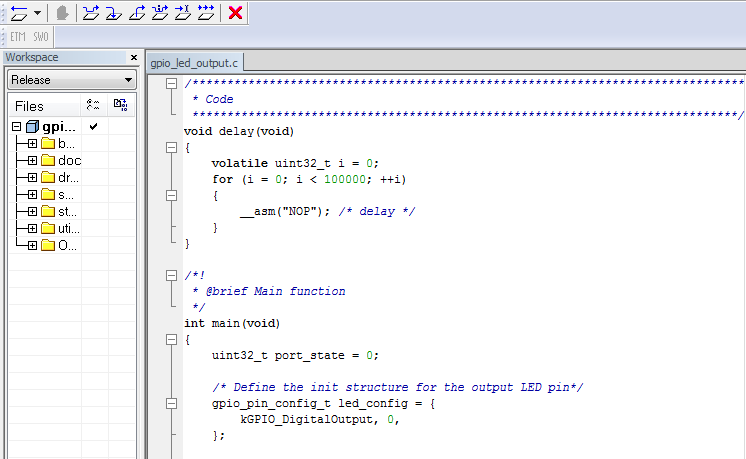
从下拉列表中选择所需的构建目标。在这个例子中,选择"hello_world - Debug"目标。
-
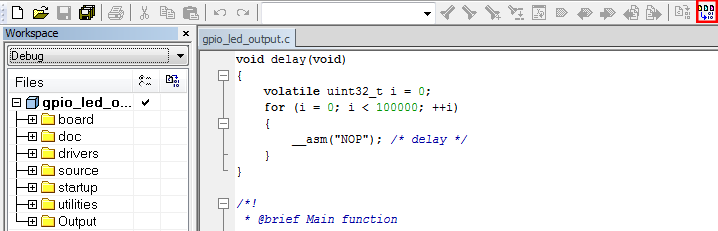
要构建应用,点击"Make"按钮(下文中用红色突出显示)。
-
构建将完成,并且不会报错。
2. 运行示例应用
LPCXpresso845-MAX板出厂时预装了CMSIS-DAP调试接口。将开发平台连接到您的PC,此举通过USB线缆连接板上的J8 “调试链路”完成。
-
点击"Download and Debug"按钮,将应用下载到目标。

-
然后,可将此应用下载到目标应用,并自动运行到main()函数。
-
点击"Go"按钮运行代码,以启动应用。

采用Keil® MDK/µVision®运行演示
1. 安装CMSIS设备包
安装MDK工具后,必须安装Cortex®微控制器软件接口标准(CMSIS)设备包,才能从调试角度来说完全支持该设备。这些设备包包括存储器映射信息、寄存器定义和闪存编程算法。按照这些步骤安装相应的CMSIS包。
-
打开名为µVision的MDK IDE。在IDE中,选择"Pack Installer"图标。

-
2. 在Pack Installer (包安装程序)窗口,浏览至有LPC数据包的部分(这些数据包按字母顺序排列)。Kinetis包名以"Keil::LPC"开头,然后是MCU系列名称,例如"Keil::LPC54000"。该示例采用LPCXpresso845-MAX平台,因此选择LPC54000系列的设备包。点击设备包旁的"Install"按钮。此流程需要连接互联网才能完成。

-
安装完成后,关闭Pack Installer窗口并返回到µVision IDE。
2. 构建示例应用
以下步骤将指导您运行gpio_led_output应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
-
如果还未完成,在以下路径中打开所需的演示应用工作区:
/boards/ / / /mdk 此演示工作区文件名为
.uvmpw,因此在这个具体例子中,实际路径为: /boards/lpcxpresso54608/driver_examples/gpio/led_output/mdk/gpio_led_output.uvmpw -
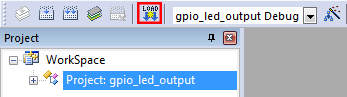
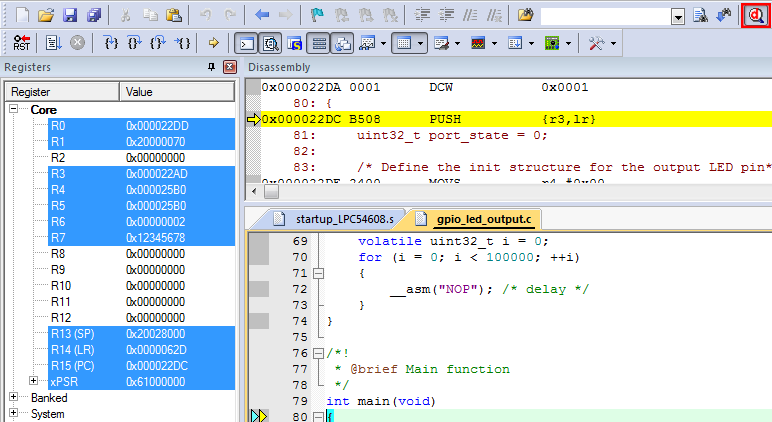
要构建演示项目,请选择"Rebuild"按钮,用红色突出显示。

-
构建将完成,并且不会报错。
3. 运行示例应用
LPCXpresso845-MAX板出厂时预装了CMSIS-DAP调试接口。
- 应用构建完成后,点击"Download"按钮,将应用下载到目标。
- 点击"Download"按钮后,此应用下载到目标并开始运行。如需调试应用,请点击"Start/Stop Debug Session"按钮,用红色突出显示。
- 点击"Run"按钮运行代码,以启用应用。
采用Kinetis Design Studio IDE运行演示
1. 安装KDS更新
开始使用带KSDK的KDS IDE之前,建议您确保工具为最新版本。以下展示的步骤针对Windows版本的KDS,但对于Mac和Linux用户同样适用。
-
选择"Help" -> "Check for Updates"。

-
安装来自恩智浦的所有更新 – 这些由“com.NXP.xxx”或“com.nxp.xxx”来表示。工具链或调试接口可能也有更新。大多数情况下,安装这些额外的更新不会有问题,但这些更新不是KDS工具链发布的一部分,所以可能会引发问题。
2. 构建示例应用
以下步骤将指导您运行hello_world应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
注:
Linux和Mac操作系统所需的步骤与Windows相同。
-
从KDS IDE菜单选择"File->Import"。在显示的窗口中,展开"Project of Projects"文件夹并选择"Existing Project Sets"。然后,点击"Next"按钮。

-
点击"Import from file:"选项旁边的"Browse"按钮浏览。

-
指向以下路径的示例应用项目:
/boards/ / / /kds 对于本指南,请选择以下位置:
/boards/frdmke15z/demo_apps/hello_world/kds -
指向正确目录后,您的"Import Working Sets and Projects"窗口显示如下图 。点击"Finish"按钮完成。

-
每个KSDK项目支持两种项目配置(构建目标):
- 调试 – 编译器优化设置为低,生成可执行文件的调试信息。选择此目标是为了开发和调试。
- 释放 – 编译器优化设置为高,不生成调试信息。选择此目标是为了最终应用部署。
-
选择适当的构建目标,"Debug"或"Release",方法是点击锤子图标旁的向下箭头,如下所示。在这个示例中,选择"Debug"目标。

-
选择构建目标后,平台库开始构建。未来重建该库时,只需点击锤子图标(假定选择同一构建目标)。
3. 运行示例应用
FRDM-KE15Z板出厂时预装了mbed/CMSIS-DAP调试接口。如果您已经更改了板上的调试OpenSDA应用,请访问http://www.nxp.com/opensda了解如何更新板或将板恢复到出厂状态。
注:
Mac用户必须安装J-Link OpenSDA应用,才能使用KDS IDE下载并调试板。
-
通过板上"SDAUSB" USB端口和PC USB接头之间的USB线缆,将开发平台连接到PC。
-
打开PC上的终端应用(如PuTTY或Tera Term),并连接到您之前确定的调试COM端口。采用以下设置配置终端:
- 波特率为15200
- 无奇偶校验
- 数据位为8
- 停止位为1
-
以下命令仅适用于Linux操作系统用户,在终端运行。根据KDS IDE所需,将libudev安装到您的系统,以便启动调试器。
user@ubuntu:~$ sudo apt-get install libudev-dev libudev1user@ubuntu:~$ sudo ln –s /usr/lib/x86_64-linux-gnu/libudev.so /usr/lib/x86_64-linux-gnu/libudev.so.0 -
确保调试器的配置与您想要连接的目标相符。这里指的是板的OpenSDA接口。如果您不确定板的型号,请参阅本对话框右上角所链接PDF的附录B。
-
为了查看可用的调试器配置,点击绿色"Debug"按钮旁向下的小箭头,并选择"Debug Configurations"。

-
在Debug Configurations对话框中,选择与您正在使用的硬件平台对应的调试配置。对于Windows或Linux用户,选择OpenOCD For Mac用户下的mbed/CMSIS-DAP选项,并选择J-Link。
选择调试器接口,并点击"Debug"按钮启动调试器。

-
-
此应用下载到目标并自动运行到main()函数:

-
点击"Resume"按钮启动应用:

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。

采用Atollic运行演示
1. 构建示例应用
以下步骤将指导您运行hello_world应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
-
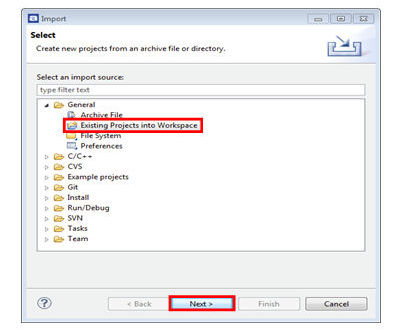
从TrueSTUDIO菜单选择"File->Import"。展开"General"文件夹并选择"Existing Projects into Workspace"。然后,点击"Next"按钮。
-
点击"Select root directory:"选项旁边的"Browse"按钮浏览。

指向以下路径的示例应用项目:
/boards/ / / /atl 对于本指南,请选择以下位置:
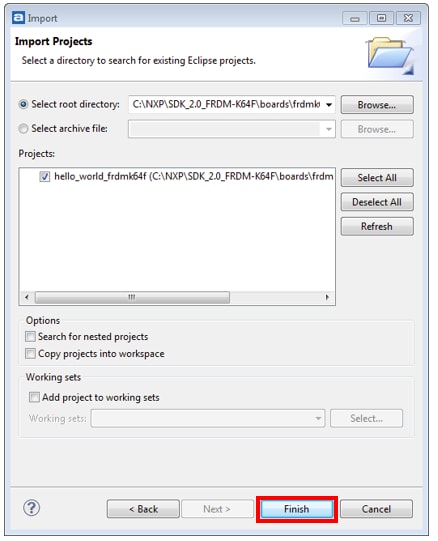
/boards/frdmke15z/demo_apps/hello_world/atl -
指向正确目录后,您的"Import Projects"窗口显示如下图 。点击"Finish"按钮完成。
-
每个KSDK项目支持两种项目配置(构建目标):
- 调试 – 编译器优化设置为低,生成可执行文件的调试信息。选择此目标是为了开发和调试。
- 释放 – 编译器优化设置为高,不生成调试信息。选择此目标是为了最终应用部署。
-
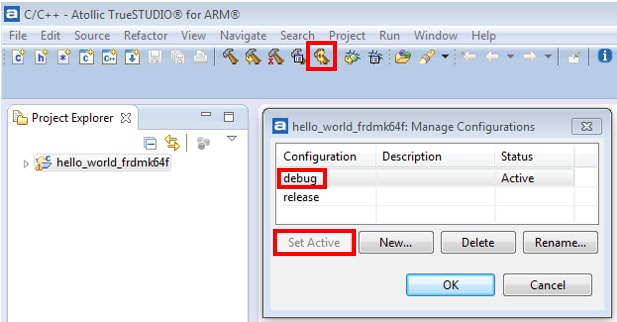
选择适当的构建目标,"Debug"或"Release",方法是点击"Manage build configurations"图标,如下所示。在这个示例中,选择"Debug"目标并点击"Set Active"。由于默认配置为使用调试目标,无需更改。
-
点击"Build"图标来构建应用。

2. 运行示例应用
Atollic工具需要J-Link调试接口。要将板上的OpenSDA固件更新为最新的J-Link应用,请访问www.nxp.com/opensda。
要在板上安装JLink OpenSDAv2.1应用:
-
板未通电时,按住板上的"Reset"按钮,并将Micro-B USB线缆插入到板上的“SDA USB” USB端口。
-
放开"Reset"按钮
-
该板将枚举为"BOOTLOADER"驱动器。
-
将JLink OpenSDAv2.1 application .bin文件拖放到此驱动。
-
进行重启,此时该板将运行JLink OpenSDA应用。
-
打开PC上的终端应用(如PuTTY或TeraTerm),并连接到您之前确定的调试COM端口。采用以下设置配置终端:
- 波特率为15200
- 无奇偶校验
- 数据位为8
- 停止位为1
-
确保调试器的配置与您想要连接的目标相符。
- 要查看可用的调试器配置,请点击"Configure Debug"图标。

- 选择J-Link "Debug"接口并点击"Debug"按钮。
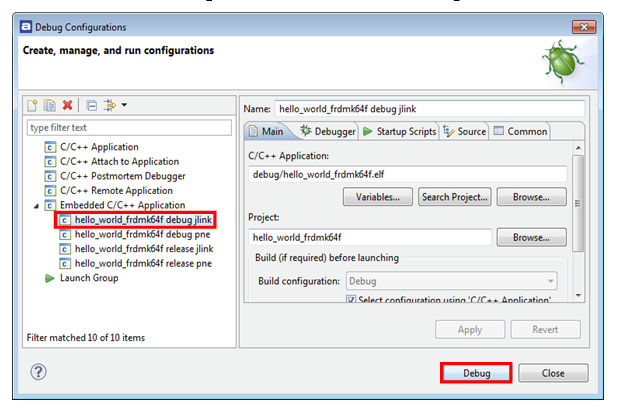
- 要查看可用的调试器配置,请点击"Configure Debug"图标。
-
此应用下载到目标并自动运行到main()函数:
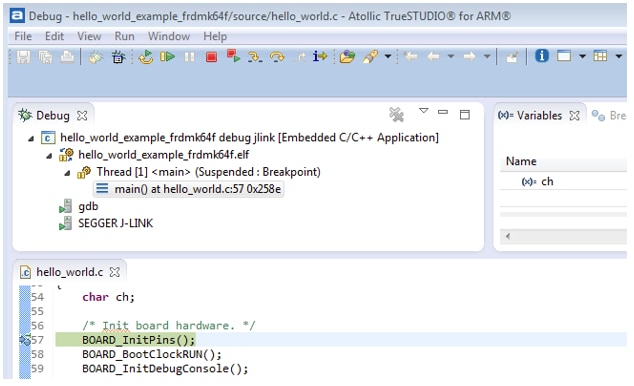
-
点击"Resume"按钮运行应用:

-
hello_world应用开始运行,标语显示在终端上。
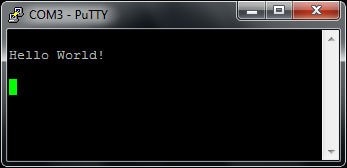
在板上加载J-Link OpenSDA应用后:
采用Arm运行演示
1. 安装工具链
本节包含采用Kinetis SDK支持的Arm GCC工具链构建并运行KSDK演示应用所需的必要组件的安装步骤。Arm GCC工具有许多使用方式,但此例主要演示其在Windows环境中的使用。虽然这里未讨论,但GCC工具还可与Linux操作系统和Mac OSX配套使用。
安装GCC Arm嵌入式工具链
从launchpad.net/gcc-arm-embedded下载并运行安装程序。这是我们实际使用工具链(例如,编译器、链接器等)。GCC工具链应当对应最新的支持版本,参见Kinetis SDK版本说明。
安装MinGW
Minimalist GNU for Windows (MinGW)开发工具提供了一套独立于第三方C-Runtime DLL (如Cygwin)的工具。KSDK所用的构建环境无需使用MinGW Build工具,但充分利用了MinGW和MSYS的基础安装。MSYS为与Unix类似的接口和工具提供基本的Shell。
-
从sourceforge.net/projects/mingw/files/Installer/下载最新的MinGW mingw-get-setup安装程序。
-
运行安装程序。推荐的安装路径为C:\MinGW,但是,您可以将其安装到任何位置。
-
确保在Basic Setup菜单下选择了"mingw32-base"和"msys-base"。

-
点击"Installation"菜单中的"Apply Changes",并按照其余指令完成安装。

-
添加相应项目到Windows操作系统的Path环境变量。在"Environment Variables..."部分的Control Panel -> System and Security -> System -> Advanced System Settings下可找到它。路径为:
\bin 假设默认安装路径为C:\MinGW,此例如下所示。如果路径设置不正确,工具链将不起作用。
注:
如果您的Path变量中包含"C:\MinGW\msys\x.x\bin" (根据KSDK 1.0.0要求),删除该路径以确保新的GCC构建系统正常工作。

-
从www.cmake.org/cmake/resources/software.html下载CMake 3.0.x。
-
安装CMake,确保安装时选择"Add CMake to system PATH"选项。由用户选择是为所有用户还是只为当前用户将其安装到PATH。在这个示例中,假设为所有用户安装了此应用。

-
按照安装程序的其余指令操作。
-
可能需要重启系统,才能使PATH更改生效。
注:
此安装路径不包含任何空格。
为ArmGCC_DIR添加新环境变量
创建新的系统环境变量并命名为ArmGCC_DIR。此变量的值应当指向Arm GCC嵌入式工具链安装路径,此例中的安装路径为:
C:\Program Files (x86)\GNU Tools Arm Embedded\4.9 2015q3
参考GNU Arm GCC嵌入式工具的安装文件夹,获得确切的安装路径名。

安装CMake
2. 构建示例应用
要构建示例应用,请按照这些步骤操作。
-
1.如果没有运行,则打开GCC Arm嵌入式工具链命令窗口。要启动窗口,需从Windows操作系统Start菜单进入"Programs -> GNU Tools ARM Embedded
",然后选择"GCC Command Prompt"。 
-
将目录更改为示例应用项目目录,它有如下路径:
/boards/ / / /armgcc 对于本指南,确切的路径为:
/boards/frdmke15z/demo_apps/hello_world/armgcc -
在命令行键入"build_debug.bat"或双击Windows操作系统Explorer中的"build_debug.bat"文件,执行构建。输出显示如图:

3. 运行示例应用
GCC工具需要J-Link调试接口。要将板上的OpenSDA固件更新为最新的J-Link应用,请访问www.nxp.com/opensda。安装J-Link OpenSDA应用后,从www.segger.com/downloads.html下载J-Link驱动程序和软件包。
-
通过板上"SDAUSB" USB端口和PC USB接头之间的USB线缆,将开发平台连接到PC。
-
打开PC上的终端应用(如PuTTY或Tera Term),并连接到您之前确定的调试COM端口。采用以下设置配置终端:
- 波特率为15200
- 无奇偶校验
- 数据位为8
- 停止位为1
-
打开J-Link GDB服务器应用。假设已安装了J-Link软件,进入Windows操作系统Start菜单并选择"Programs -> SEGGER -> J-Link
J-Link GDB Server" ,可以启动此应用。 -
修改设置,如下所示。这个示例中所选的目标设备为"MK64FN1M0xxx12",并使用SWD接口。

-
设备连接后,屏幕显示如图:

-
如果没有运行,则打开GCC Arm嵌入式工具链命令窗口。要启动窗口,需从Windows操作系统Start菜单进入"Programs -> GNU Tools ARM Embedded
",然后选择"GCC Command Prompt"。 
-
更改为包含演示应用输出的目录。根据所选的构建目标,使用以下2个路径中的一个可以找到此输出:
/boards/ / / /armgcc/debug /boards/ / / /armgcc/release 对于本指南,路径为:
/boards/frdmke15z/demo_apps/hello_world/armgcc/debug -
运行命令"arm-none-eabi-gdb.exe
.elf"。在这个示例中,命令为"arm-none-eabi-gdb.exe hello_world.elf"。 
-
运行以下命令:
- "target remote localhost:2331"
- "monitor reset"
- "monitor halt"
- "load"
- "monitor reset"
-
此应用已下载成功并停留在复位矢量。执行"monitor go"命令来启动示例应用。
hello_world应用开始运行,标语显示在终端窗口上。
