The wiring harness is the smart communication network in every modern car.
This network is connected to as many as a hundred ECUs (Electronic Control
Units), also known as ‘nodes,’ that control the electronics in
the car. These days, all modern cars contain these nodes, ranging from two
nodes in the Tata Nano (city car manufactured by Tata Motors, made and sold in
India) to over a hundred in a Mercedes S-Class. A modern car has dozens of
different electronic units on board, such as the engine management system,
power steering, electric windows, air conditioning, lighting, etc. All these
units are controlled by chips that use the wiring harness to communicate with
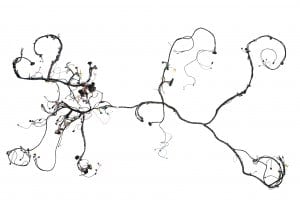
each other. The picture below shows a wiring network of a midsize car. An
average wiring harness consists of over a thousand wires, weighs 45 kilos and
measures a kilometer in length.
However, the amount of electronics in cars is booming. Motorists want more
features, such as navigation, Bluetooth, and parking sensors and governments
want to reduce CO2 emissions. More often drivers have to pay more taxes for
cars that are heavier and more polluting. As a result, manufacturers are
constantly increasing car safety through e.g. ‘adaptive cruise
control’ and stabilization programs and trying to reduce the weight of
the car. All these applications require electronics. The consequence of this
development is that the wiring harness in a car has to meet increasingly high
demands and has to function in smarter way to make the car lighter and reduce
fuel consumption.
 The wiring harness actually consists of different data networks: CAN, LIN,
and FlexRay. There are two reasons for this multiple network interconnection.
The first reason is a historical one. Innovations in cars are evolutionary in
nature, so when a new technology has been implemented, it takes many years
before it is completely replaced by a newer one. The second reason is
cost-related. For example, a LIN network is relatively simple and cheap, but
very suitable for controlling simple applications such as electric windows and
central locking. However, because of the need for bandwidth of the growing
amount of information (sensors, etc.) in cars, and the wish to make cars
lighter, we also need complex networks with a high bandwidth, such as FlexRay.
The wiring harness actually consists of different data networks: CAN, LIN,
and FlexRay. There are two reasons for this multiple network interconnection.
The first reason is a historical one. Innovations in cars are evolutionary in
nature, so when a new technology has been implemented, it takes many years
before it is completely replaced by a newer one. The second reason is
cost-related. For example, a LIN network is relatively simple and cheap, but
very suitable for controlling simple applications such as electric windows and
central locking. However, because of the need for bandwidth of the growing
amount of information (sensors, etc.) in cars, and the wish to make cars
lighter, we also need complex networks with a high bandwidth, such as FlexRay.
What is essential for a network to be reliable is that ‘a
message’ sent by the ECUs is guaranteed to be executed immediately,
especially where passenger safety is concerned. If the brakes have to be
activated, this has to happen straightaway. The older LIN and CAN networks are
not so suited to this purpose and are fairly slow, but FlexRay can meet these
requirements.
In a FlexRay network, each application has its own time slot in the network,
so that it is known exactly when the signal can be sent and will be received.
This guarantees that an application can always send information through the
network. In addition, the network is 10 times faster than CAN, which means
fewer wires are needed, which in turn means less weight, and ultimately less
fuel.
The next step towards even faster networks has already been taken: Ethernet,
with a bandwidth up to 100 Mbit/s. Ethernet enables more cameras in cars, such
as the reverse camera, enabling motorists to see people or objects that are
directly behind the car, a rear view camera system to prevent collision damage
and personal injuries of infants and the ‘bird-view’
application, which allows motorists to see ‘around the corner’,
for example when leaving a parking garage. With Ethernet, it will also be
possible to improve the safety systems in cars such as ESP and ABS to control
the cars dynamics under more difficult circumstances like snow and ice.




