MIMXRT1040-EVK快速入门

2. 获取软件
2.1 采用MCUXpresso SDK,快速开始设计
MCUXpresso SDK为免费附赠,包含所有硬件抽象和外设驱动软件的完整源代码,根据宽松的开源许可提供。
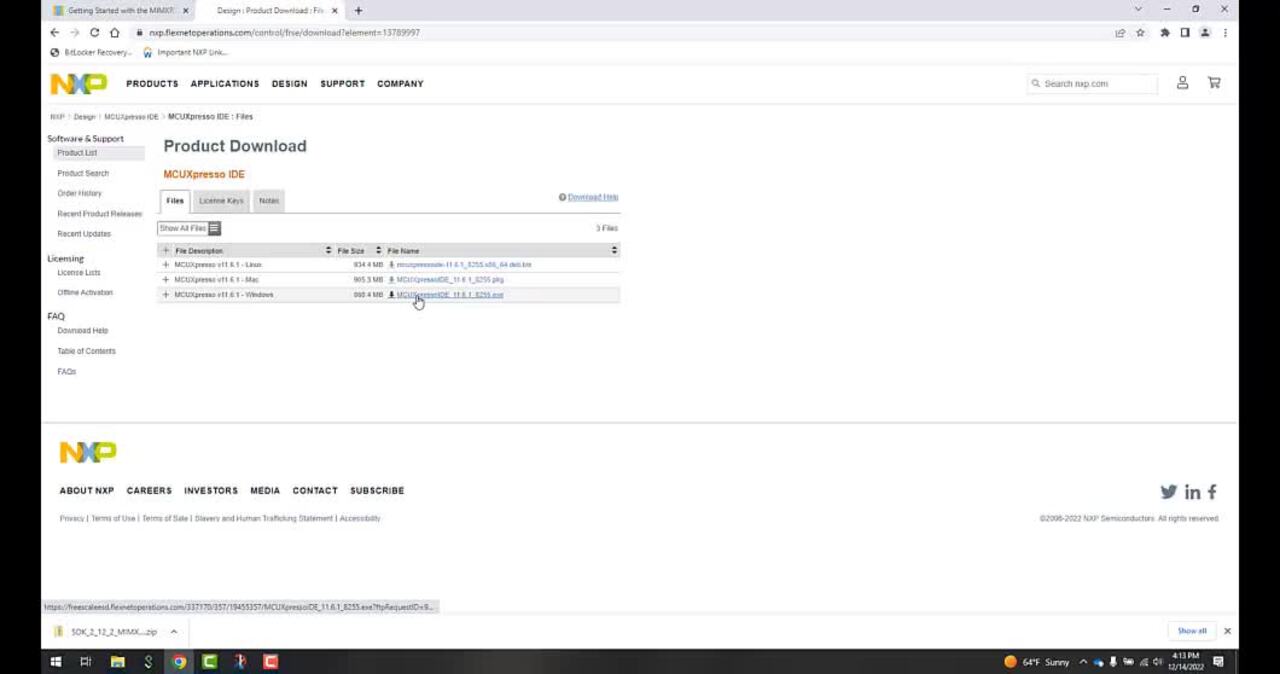
点击以下链接,下载MIMXRT1040-EVK的预配置SDK版本

您还可以使用在线SDK构建工具,为使用SDK构建工具的MIMXRT1040-EVK创建定制SDK包。


2.3 PC配置
许多示例应用通过MCU UART输出数据,因此您需要确保已安装了板虚拟COM端口的驱动程序。运行驱动程序之前,必须将板插入您的PC。
借助已安装的串行端口驱动程序,运行您喜欢的终端应用,查看MCU UART的串行输出。将终端的波特率配置为115200,数据位配置为8,无奇偶校验位,停止位为1。如需确定MIMXRT1040-EVK虚拟COM端口的端口号,请打开设备管理器并在"端口"组下查找。

不确定如何使用终端应用?试试这些教程:
Tera Term教程、PuTTY教程3. 构建、运行
3.1 浏览MCUXpresso SDK示例代码
MCUXpresso SDK附带一系列示例应用代码。如需查看内容,请浏览SDK安装中的SDK boards文件夹,并选择板MIMXRT1040-EVK (
如需了解特定示例代码的详细信息,请参阅示例目录中的readme.txt文件。
3.2 构建、运行并调试MCUXpresso SDK示例
如果您对其中的一个或几个演示应用或驱动程序示例感兴趣,也许想了解如何自己完成构建和调试。MCUXpresso SDK快速入门指南按步骤介绍了如何轻松地为SDK支持的所有工具链配置、构建和调试演示。
采用以下指南,了解如何使用MCUXpresso IDE打开、构建和调试示例应用。
使用MCUXpresso IDE
导入MCUXpresso SDK
- 打开MCUXpresso IDE
- 选择计算机上的目录作为演示工作区

- 切换到MCUXpresso IDE窗口中的“已安装SDK”视图
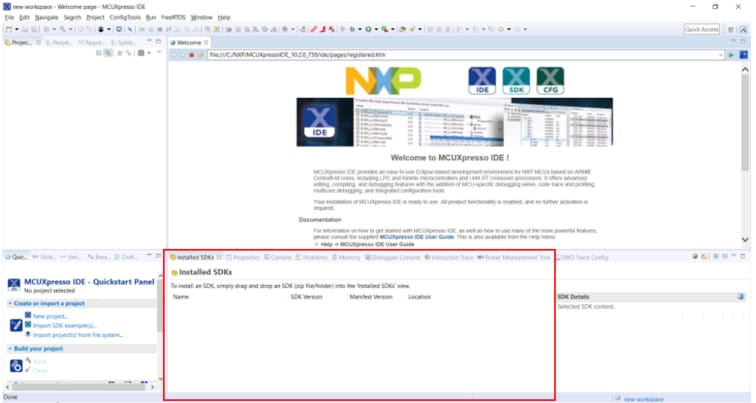
- 打开Windows资源管理器,并将EVK-MIMXRT1040 SDK(压缩)文件拖放到“已安装SDK”视图中。
- 您将获得以下提示。点击OK(确定)继续导入:

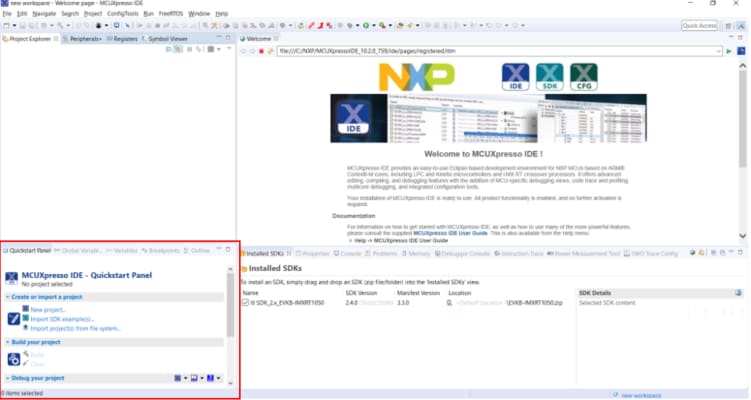
- 已安装的SDK将显示在“已安装SDK”视图中,如下所示:

构建示例应用
以下步骤将指导您打开hello_world示例。
-
在左下角找到快速启动面板
-
然后点击“导入SDK示例……”

-
点击evkMIMXRT1040板,选择导入可在该板上运行的示例,然后点击“下一步”

-
使用箭头按钮来展开demo_apps类别,然后点击hello_world旁边的复选框来选择该项目。确保选择UART作为SDK调试控制台。然后点击“完成”

-
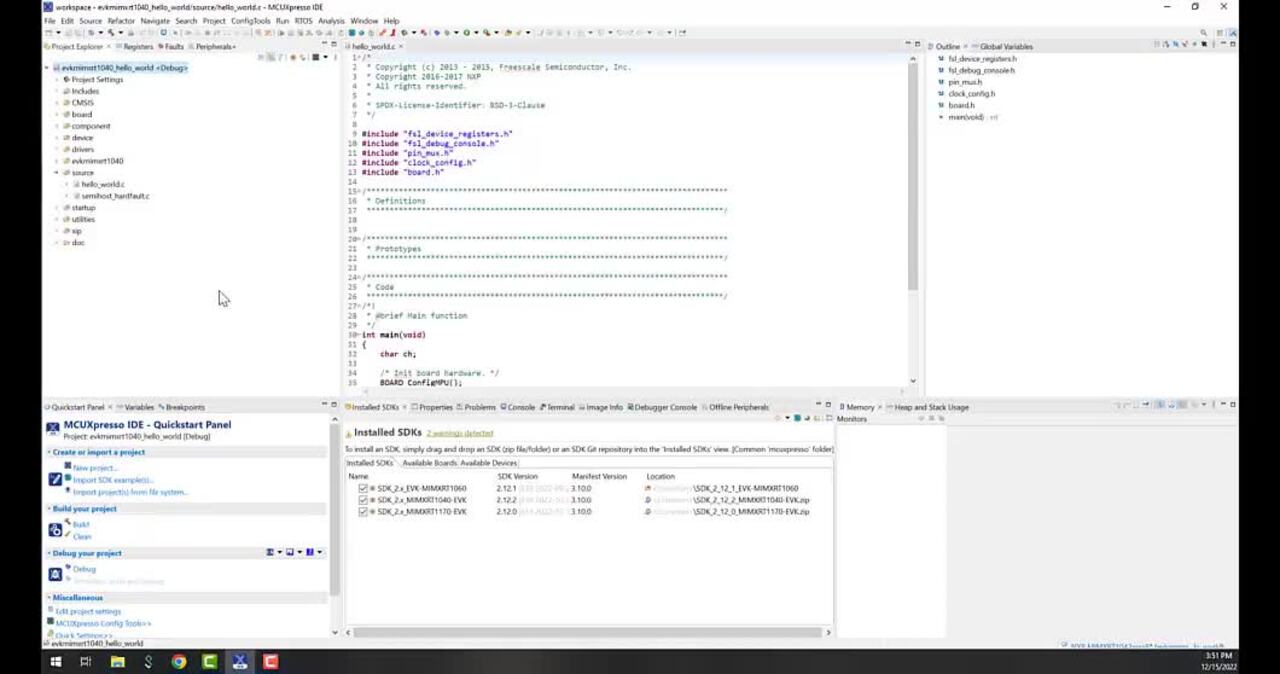
现在点击项目名称来构建项目,然后点击Build图标
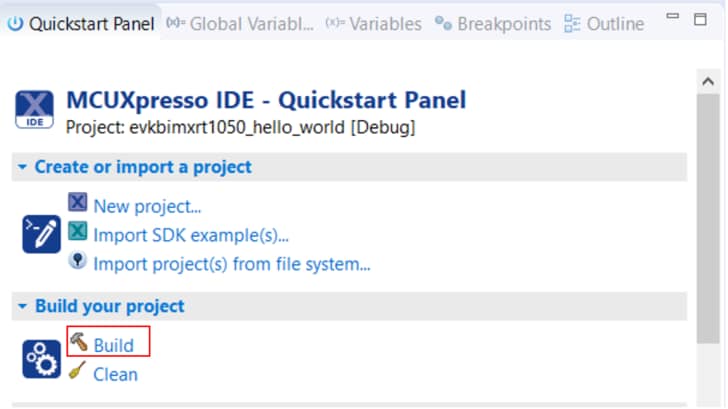
-
您可以在“控制台”选项卡中查看构建的状态

运行示例应用
- 项目已经编译好了,现在您可以将其闪存到板上并运行它
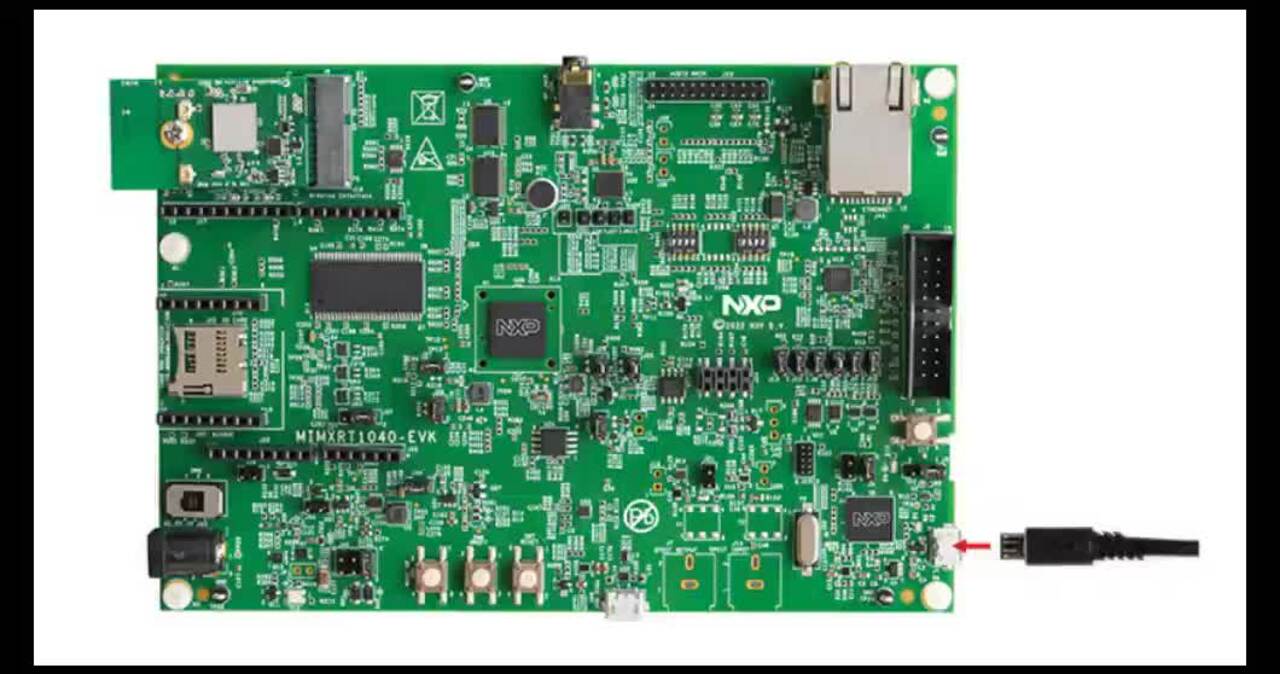
- 确保USB线已插入到MIMXRT1040-EVK上的OpenSDA调试接头,然后在“快速启动”面板点击“调试”

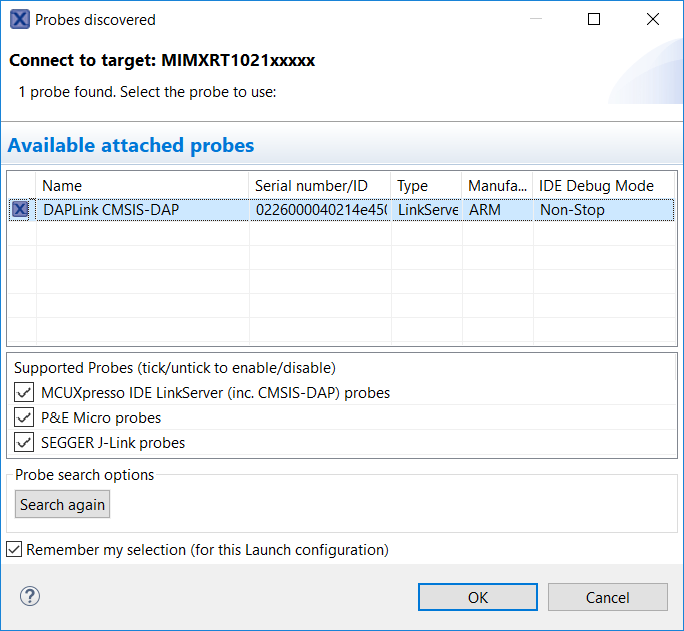
- MCUXpresso IDE将探测互联的板,并应查找CMSIS-DAP硬件调试器,此硬件调试器是MIMXRT1040-EVK上集成OpenSDA电路的一部分。点击“确定”继续
- 固件将被下载到板上,调试器开始运行
- 打开一个终端程序,并连接到已显示的板上的COM端口。使用115200波特率,数据位为8, 无奇偶校验位,停止位为1
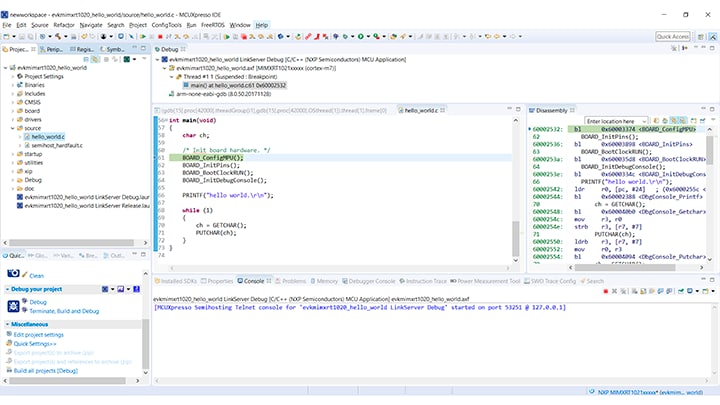
- 点击"Resume"按钮启动应用:

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接
- 使用菜单栏的控件暂停、进入和逐步执行指令,然后点击Terminate(终止)图标停止调试会话:

想使用其他工具链?
使用IAR EWARM
构建示例应用
遵循以下步骤运行hello_world示例应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
-
如果还未完成,在以下路径中打开所需的演示应用工作区。大多数示例应用演示区文件位于以下路径:
1
/boards/ / / /iar 以
hello_world演示为例,路径为:1
/boards/evkMIMXRT1040/demo_apps/hello_world/iar/hello_world.eww -
从下拉列表中选择所需的构建目标。
在这个例子中,选择“
hello_world– Debug”目标。
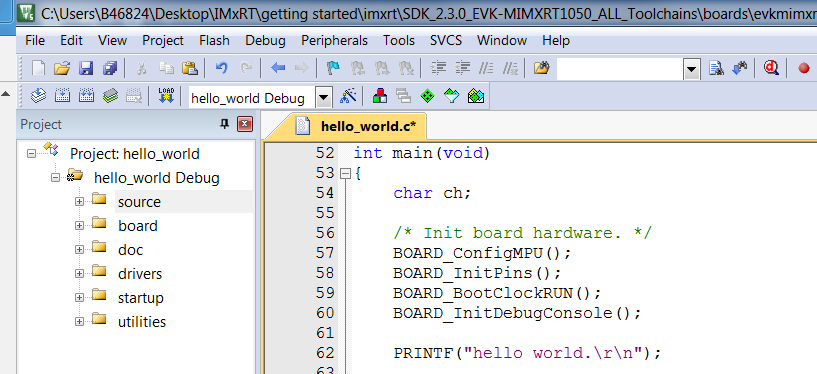
- 要构建演示应用,点击"Make"按钮,在下文用红色突出显示

- 构建将完成,并且不会报错
运行示例应用
如需下载并运行该应用,请执行以下步骤:
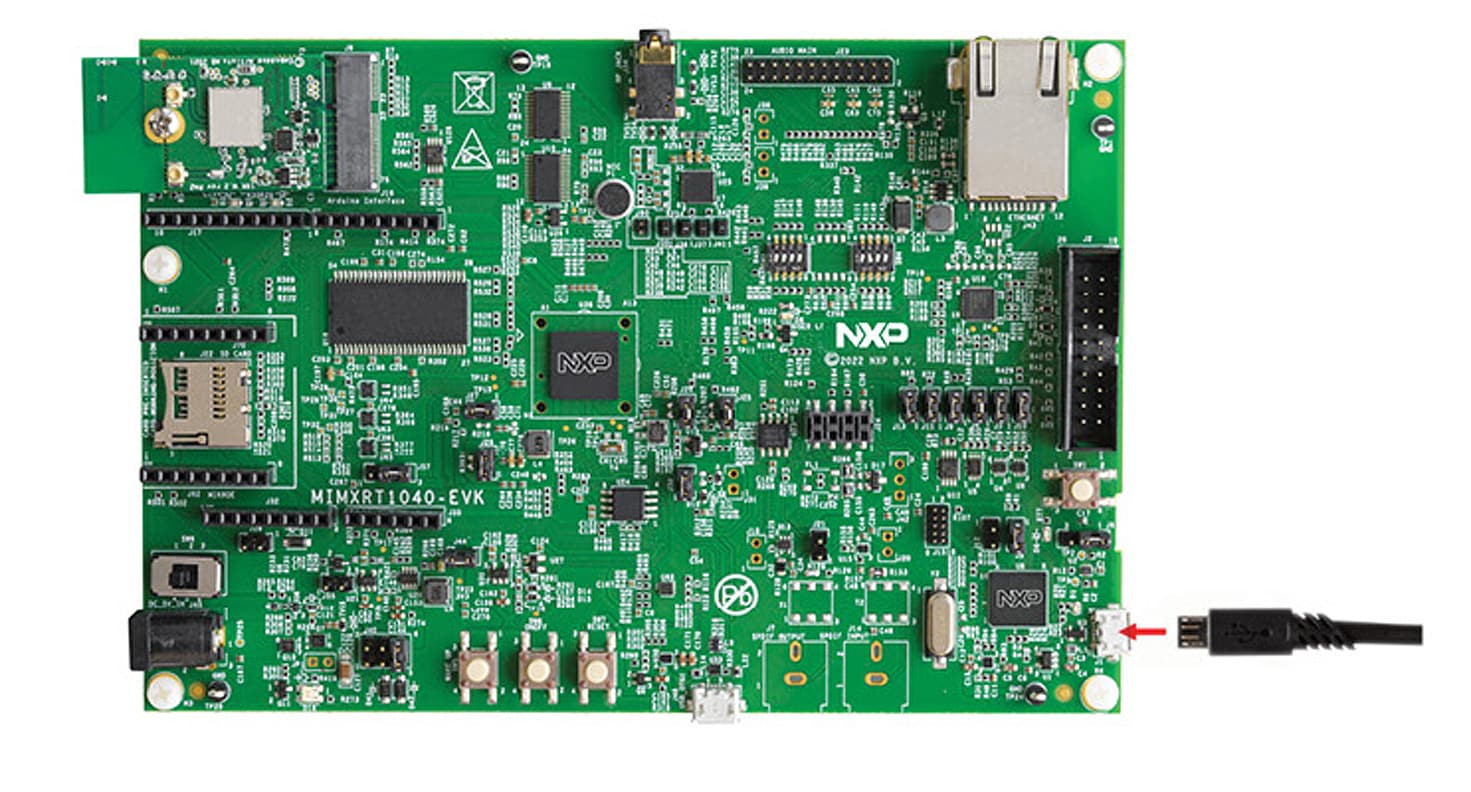
- 通过USB线将开发平台连接到PC
-
打开PC上的终端应用(如PuTTY或TeraTerm),并连接到调试COM端口。采用以下设置配置终端:
- 115200波特率,(参考board.h文件中的BOARD_DEBUG_UART_BAUDRATE变量)
- 无奇偶校验位
- 数据位为8
- 停止位为1
- 在IAR中,点击"Download and Debug"(下载和调试)按钮,将应用下载到目标。

- 然后,可将此应用下载到目标应用,并自动运行到
main()函数 -
点击"Go"按钮运行代码,以启动应用。

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。
使用Keil®MDK
安装CMSIS设备包
安装MDK工具后,必须安装Cortex®微控制器软件接口标准(CMSIS)设备包,才能从调试角度来说完全支持该器件。这些设备包包括存储器映射信息、寄存器定义和闪存编程算法。按照这些步骤安装MIMXRT105x CMSIS包。
- 下载iMXRT包
- 下载DFP后,双击进行安装
构建示例应用
遵循以下步骤运行hello_world应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
-
如果还未完成,在以下路径中打开所需应用的示例应用演示工作区:
/boards/ / / /mdk 此工作区文件名为
.uvmpw,因此在这个具体示例中,实际路径为: 1
/boards/evkMIMXRT1040/demo_apps/hello_world/mdk/hello_world.uvmpw -
要构建演示项目,请选择"Rebuild"按钮,用红色突出显示。

-
构建将完成,并且不会报错。
运行示例应用
如需下载并运行该应用,请执行以下步骤:
-
通过USB线将开发平台连接到PC
-
打开PC上的终端应用(如PuTTY或TeraTerm),并连接到调试串行端口。采用以下设置配置终端:
- 115200波特率,(参考
board.h文件中的BOARD_DEBUG_UART_BAUDRATE变量) - 无奇偶校验位
- 数据位为8
- 停止位为1
- 115200波特率,(参考
-
应用构建完成后,点击"Download"(下载)按钮,将应用下载到目标。

-
如需调试应用,请点击"Start/Stop Debug Session"(开始/停止调试会话)按钮,用红色突出显示。
-
点击"Run"(运行)按钮运行代码,以启用应用。

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。
使用Arm®GCC
安装工具链
本节包含采用Kinetis SDK支持的Arm GCC工具链构建并运行KSDK演示应用所需的必要组件的安装步骤。Arm GCC工具有许多使用方式,但此例主要演示其在Windows环境中的使用。虽然这里未讨论,但GCC工具还可与Linux操作系统和Mac OSX配套使用。
安装GCC Arm嵌入式工具链
从GNU Arm Embedded Toolchain下载并运行安装程序。这是我们实际使用工具链(例如,编译器、链接器等)。GCC工具链应当对应最新的支持版本,参见Kinetis SDK版本说明。
安装MinGW
Minimalist GNU for Windows(MinGW)开发工具提供了一套独立于第三方C-Runtime DLL(如Cygwin)的工具。KSDK所用的构建环境无需使用MinGW Build工具,但充分利用了MinGW和MSYS的基础安装。MSYS为与Unix类似的接口和工具提供基本的Shell。
- 从以下位置下载最新的MinGW mingw-get-setup安装程序:MinGW - Minimalist GNU for Windows Files
- 运行安装程序。推荐的安装路径为C:\MinGW,但是,您可以将其安装到任何位置。
- 确保在Basic Setup菜单下选择了"
mingw32-base"和"msys-base"。
- 点击"Installation"菜单中的"Apply Changes",并按照其余指令完成安装。

-
添加相应项目到Windows操作系统的Path环境变量。在"Environment Variables..."部分的Control Panel → System and Security → System → Advanced System Settings下可找到它。路径为:
1
\bin 假设默认安装路径为C:\MinGW,此例如下所示。如果路径设置不正确,工具链将无法正常运行。

-
从以下位置下载CMake 3.0.x:CMake
-
安装CMake,确保安装时选择"Add CMake to system PATH"选项。由用户选择是为所有用户还是只为当前用户将其安装到PATH。在这个示例中,假设为所有用户安装了此应用。

- 按照安装程序的其余指令操作
- 可能需要重启系统,才能使PATH更改生效
为ARMGCC_DIR添加新环境变量
创建新的系统环境变量并命名为ARMGCC_DIR。此变量的值应当指向Arm GCC嵌入式工具链安装路径,此例中的安装路径为:
C:\Program Files (x86)\GNU Tools Arm Embedded\4.9 2015q3 参考GNU Arm GCC嵌入式工具的安装文件夹,获得确切的安装路径名。

安装CMake
构建示例应用
要构建示例应用,请按照这些步骤操作。
- 如果没有运行,则打开GCC ARM嵌入式工具链命令窗口。要启动窗口,需从Windows操作系统“开始”菜单进入“Programs → GNU Tools ARM Embedded
”,然后选择“GCC Command Prompt”。 -
将目录更改为示例应用项目目录,它有如下路径:
1
/boards/ / / /armgcc 对于本指南,确切的路径为:
1
/boards/evkMIMXRT1040/demo_apps/hello_world/armgcc 
-
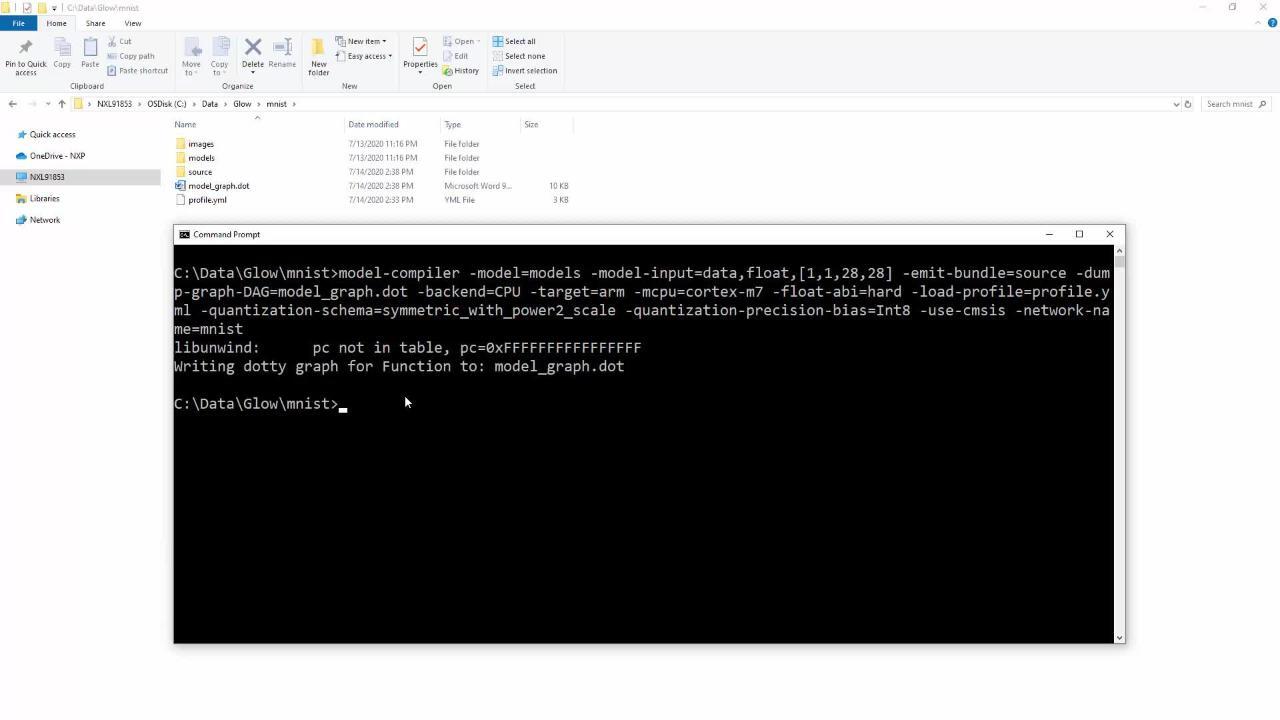
在命令行输入"
build_flexspi_nor_debug.bat",或双击Windows操作系统Explorer中的"build_flexspi_nor_debug.bat"文件,执行构建。输出显示如图:
运行示例应用
本节将介绍使用J-Link GDB Server应用运行演示应用的步骤。要执行本练习,请先完成以下两步:
- 确保:
- 板上的OpenSDA接口已编程J-Link OpenSDA固件。如果您的板不支持OpenSDA,则需要单独的J-Link Pod
- 您拥有独立的J-Link Pod,并且连接至板的调试接口。请注意:某些硬件平台需要修改硬件,以便通过外部调试接口正常运行
配置并连接J-Link接口之后,按照以下步骤下载并运行演示应用:
- 本板支持J-Link硬件调试器。使用前,请安装SEGGER软件(可从Segger主页下载)
- 通过OpenSDA USB端口和PC USB接头之间的USB线缆,将开发平台连接到PC。如果使用独立的J-Link调试Pod,请也将其连接至板的SWD/JTAG接头
- 打开PC上的终端应用(如PuTTY或TeraTerm),并连接到调试串行端口。采用以下设置配置终端:
- 115200波特率,(参考
board.h文件中的BOARD_DEBUG_UART_BAUDRATE变量) - 无奇偶校验位
- 数据位为8
- 停止位为1
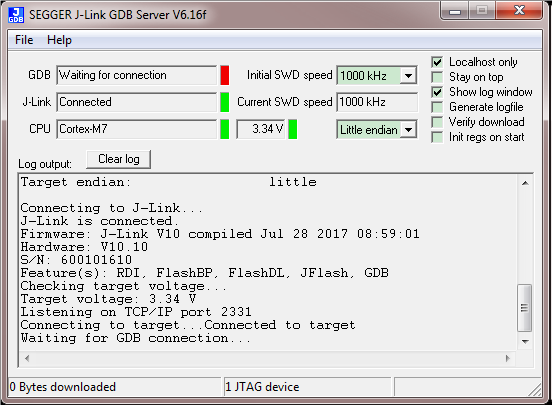
打开J-Link GDB Server应用。访问SEGGER安装文件夹,例如:C:\Program Files (x86)\SEGGER\JLink_V616f。打开命令行窗口,对于Debug and Release目标,使用命令"JLinkGDBServer.exe"。

更改为包含示例应用输出的目录。根据所选的构建目标,使用以下任一路径可以找到此输出
1 /boards/// /armgcc/debug 1 /boards/// /armgcc/release 在这个示例中,路径为:
1 /boards/evkMIMXRT1040/demo_apps/hello_world/armgcc/debug arm-none-eabi-gdb.exe .elf ”。对于本示例,命令为“arm-none-eabi-gdb.exe hello_world.elf”。
运行以下命令:
"target remote localhost:2331"
"monitor reset"
"monitor halt"
"load"
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。
启动选项
进一步了解i.MX RT系列支持的不同启动源,包括芯片内执行功能(XIP)。

安全
i.MX RT安全启动实验室指南——了解如何使用i.MX系列的安全启动功能,包括如何生成密钥对和证书,如何使用leftosb工具编程熔丝以及签署固件。
实现当今的安全需求:使用跨界处理器实现端到端安全——了解物联网终端和边缘节点应满足的共同安全目标,以及在终端设备中实现信任根所需的步骤、工具和程序。
一站式安全启动工具:发布NXP-MCUBootUtility v1.0.0——NXP-MCUBootUtility v1.0.0是专门为恩智浦MCU安全启动设计的GUI工具。它包含了恩智浦官方安全使能工具集的所有功能,并支持完整的图形用户界面操作。
外部存储器
如何启用从QSPI闪存启动——本文介绍了如何使用Open SDA或MfgTool逐步使用Flashloader将可启动镜像编程到外部存储设备中。
如何为FLEXSPI NOR闪存启用调试—— 本应用笔记介绍了如何编程、调试和配置新的FLEXSPI NOR闪存
使用Adesto EcoXip存储器开发代码——了解如何使用Adesto EcoXip闪存设备配置恩智浦i.MX RT1050 EVKB板的硬件和软件要求。
电机控制
使用i.MX RT让电机旋转起来——本演示内容涵盖了让BLDC、PMSM或ACIM电机旋转起来的MCU要求、电机控制基础知识和框架,以及如何在i.MX RT上实现电机控制。
MIMXRT10xx EVK上的PMSM磁场定向控制的应用笔记——描述了用于三相永磁同步电机(PMSM)的有传感器以及无传感器速度和位置电机控制软件的实现。
MIMXRT10xx EVK上的PMSM磁场定向控制用户指南——逐步指导如何在常见的IDE中打开、编译、调试和运行永磁同步电机(PMSM)项目,如IAR Embedded Workbench®、MCUXpresso和Vision®Keil®IDE等。它还描述了如何将恩智浦Freedom PMSM功率模块和i.MX RT10xx评估套件转换为完整的电机控制参考设计,以及如何初始化FreeMASTER GUI工具来控制电机控制应用。
机器学习
具有i.MX RT的eIQ®迁移学习实验室——学习如何在模型上执行迁移学习,以及如何在i.MX RT1040平台上运行它们。
面向i.MX RT的eIQ Glow Lab——通过运行手写数字识别模型示例,学习如何使用Glow神经网络编译器工具。下面还提供了涵盖该实验室的分步视频
Glow神经网络编译器快速入门:
图形
使用恩智浦MCU和Embedded Wizard在实时工业HMI系统中实现图形功能——恩智浦已携手TARA Systems,提供Embedded Wizard软件技术来实现此功能。i.MX RT1040的MCUXpresso SDK中提供了完全集成的Embedded Wizard示例项目。
Embedded Wizard和MCUXpresso快速入门——了解如何下载包含Embedded Wizard的SDK,以及如何在设备上启动并运行示例项目。
使用i.MX RT10xx MCU和Crank Storyboard板在实时工业HMI系统中实现图形功能——恩智浦已携手Crank Software,提供Storyboard软件技术来实现此功能。i.MX RT1040的MCUXpresso SDK中提供了完全集成的Storyboard示例项目。
Tera Term教程
Tera Term教程
Tera Term是一款备受欢迎的开源终端仿真应用。此程序可用来显示从恩智浦开发平台虚拟串行端口发送的信息。
- 从SourceForge下载Tera Term。下载完成后,运行安装程序,然后返回到该页面继续操作。
- 启动Tera Term。首次启动时,会显示以下对话。选择串行选项。假设已连接了板,列表中会自动填充一个COM端口。
- 配置串行端口设置(使用之前确定的COM端口号),波特率为115200,数据位为8,无奇偶校验位,停止位为1。要进行此操作,进入Setup -> Serial Port并更改设置。
- 确认连接已打开。如已连接,Tera Term将在标题栏中显示以下内容
- 一切就绪



设计资源
软件
- i.MX RT1040的MCUXpresso软件开发套件(SDK)——了解有关MCUXpresso SDK的更多信息,或开始使用我们的SDK Builder来定制并下载专用于您选择的处理器或评估板的SDK。
支持
通过设计技巧、培训文档和恩智浦技术论坛了解关于RT1040的更多信息。如果需要其他帮助,请联系恩智浦支持。
培训
- MCUXpresso软件和工具概述——MCUXpresso SDK、IDE和配置工具入门。
- 实现当今的安全需求:使用跨界处理器实现端到端安全——了解物联网终端和边缘节点应满足的共同安全目标,以及在终端设备中实现信任根所需的步骤、工具和程序。
- 使用i.MX RT让电机旋转起来——本演示内容涵盖了让BLDC、PMSM或ACIM电机旋转起来的MCU要求、电机控制基础知识和框架,以及如何在i.MX RT上实现电机控制。
- 如何采用i.MX RT创建图形——了解如何采用i.MX RT开发图形,i.MX RT可使产品设计具有先进的多媒体GUI以及更好的人机界面(HMI)体验。
- 带有i.MX RT的语音解决方案——介绍MCU Alexa语音解决方案的功能、架构、成本和易用性等优势。本课程还展示了使用Wi-Fi实现Alexa入网的开箱即用体验,以及使用高性价比的远场技术与Alexa进行交互的体验。
- 采用i.MX RT构建您的第一个Zephyr应用——了解如何在i.MX RT上启动Zephyr项目。获得Zephyr构建环境的动手实践经验,并在板上编写您的第一个Zephyr应用。