MIMXRT1020-EVK快速入门




2. 获取软件
2.1 选择开发路径
MCUXpresso软件开发套件(SDK)+集成开发环境(IDE)
- 通过SWD和JTAG支持调试
- 软件灵活性高
- 全套外设驱动器,含源代码
- 应用示例和项目文件
Zephyr™操作系统
- 可扩展的开源实时操作系统(RTOS)
- 支持多种硬件架构
- 针对资源受限设备进行了优化
- 本着安全为先的原则
要了解更多信息,请访问Zephyr OS开发人员网站。
2.2 为MIMXRT1020-EVK安装软件
2.3 采用MCUXpresso SDK,快速开始设计
MCUXpresso SDK为免费附赠,包含所有硬件抽象和外设驱动软件的完整源代码,根据宽松的开源许可提供。了解有关SDK的更多信息。
点击以下链接,下载MIMXRT1020-EVK的预配置SDK版本

您还可以使用在线SDK构建工具,为使用SDK构建工具的MIMXRT1020-EVK创建定制SDK数据包。
2.4 安装工具链
恩智浦提供名为MCUXpresso IDE的附赠工具链。
 获取MCUXpresso IDE
获取MCUXpresso IDE 想使用不同的工具链?没问题!MCUXpresso SDK包括对IAR、Keil和命令行GCC等其他工具的支持。

2.5 PC配置
许多示例应用通过MCU UART输出数据,因此您需要确保已安装了板虚拟COM端口的驱动程序。运行驱动程序之前,必须将板插入您的PC。
下载驱动程序
借助已安装的串行端口驱动程序,运行您喜欢的终端应用,查看MCU UART的串行输出。将终端的波特率配置为115200,数据位配置为8,无奇偶校验并且停止位为1。如需确定MIMXRT1020-EVK虚拟COM端口的端口号,请打开设备管理器并在"端口"组下查找。
不确定如何使用终端应用?尝试以下任一教程: Tera Term教程、 PuTTY教程。
构建、运行
3.1 在MIMXRT1020-EVK上构建和运行SDK演示
3.2 浏览MCUXpresso SDK示例代码
MCUXpresso SDK附带一系列示例应用代码。如需查看内容,请浏览SDK安装中的SDK板文件夹,并选择您的板MIMXRT1020-EVK。
1/boards/evkmimxrt1020 .如需了解特定示例代码的详细信息,请参阅示例目录中的readme.txt文件。
3.3 构建、运行并调试MCUXpresso SDK示例
如果您对其中的一个或几个演示应用或驱动程序示例感兴趣,也许想了解如何自己完成构建和调试。MCUXpresso SDK快速入门指南按步骤介绍了如何轻松地为SDK支持的所有工具链配置、构建和调试演示。
采用以下指南,了解如何使用MCUXpresso IDE打开、构建和调试示例应用。
使用MCUXpresso IDE
导入MCUXpresso SDK
- 打开MCUXpresso IDE
- 选择计算机上的目录作为演示工作区。

- 切换到MCUXpresso IDE窗口中"已安装的SDK"视图。
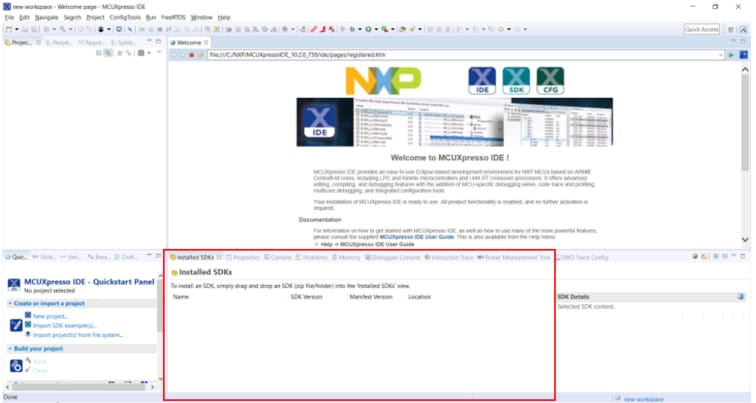
- 打开Windows资源管理器,并将EVK-MIMXRT1020 SDK(压缩)文件拖放到已安装的SDK视图中。
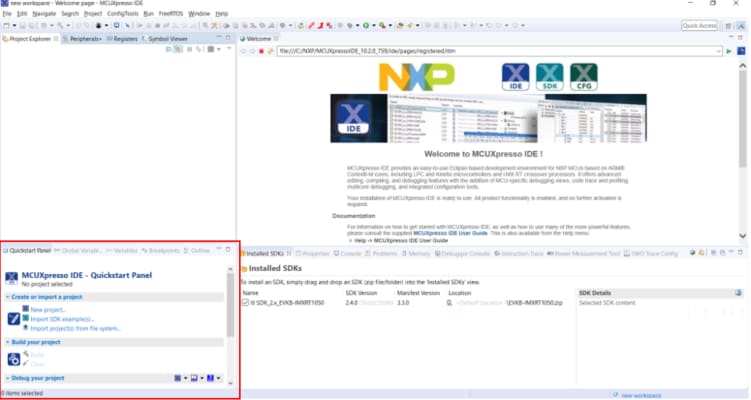
- 您将获得以下提示。单击OK继续导入:

- 已安装的SDK将显示在“已安装的SDK”视图中,如下所示:

构建示例应用
-
在左下角找到快速启动面板
-
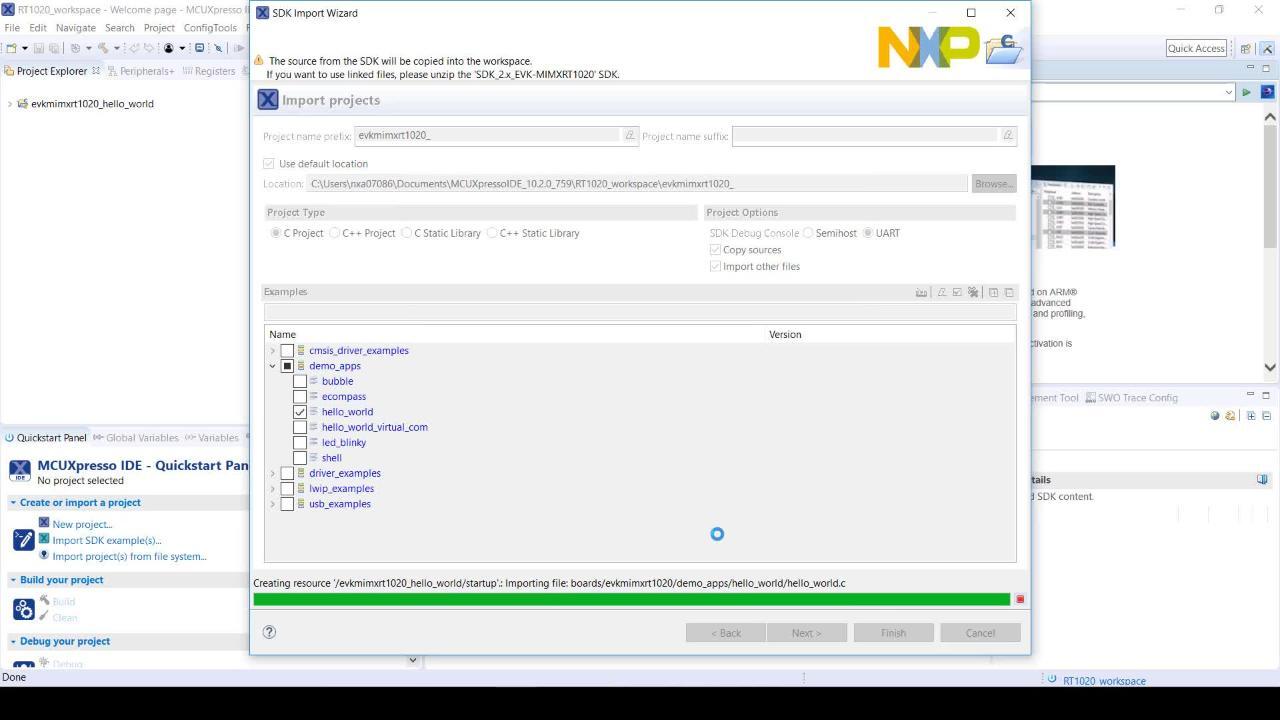
然后点击导入Import SDK示例…

-
单击evkmimxrt1020板,选择导入可在该板上运行的示例,然后单击Next(“下一步”)。

-
使用箭头按钮来展开demo_apps类别,然后点击hello_world旁边的复选框来选择该项目。确保选择UART作为SDK调试控制台。然后点击Finish。

-
现在点击项目名称来构建项目,然后点击Build图标。
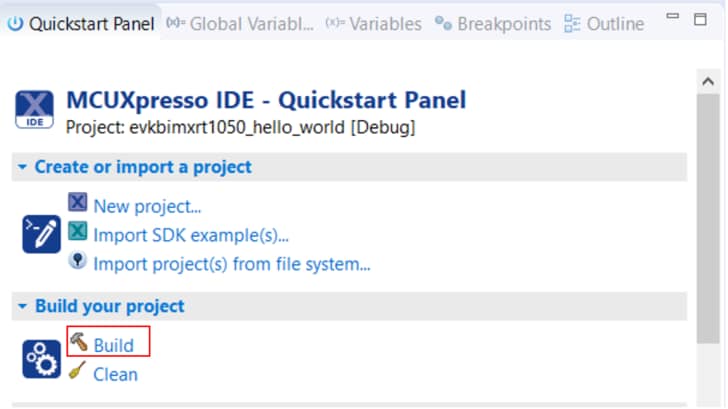
-
您可以在“控制台”选项卡中查看构建的状态。

运行示例应用
- 项目已经编译好了,现在您可以将其闪存到板上并运行它。
- 确保USB线已插入到MIMXRT1020-EVK上的OpenSDA调试接头,然后在“快速启动”面板点击Debug(调试)。

-
MCUXpresso IDE将探测互联的板,并应查找CMSIS-DAP硬件调试器,此硬件调试器是MIMXRT1020-EVK上集成OpenSDA电路的一部分。点击OK(确定)继续。
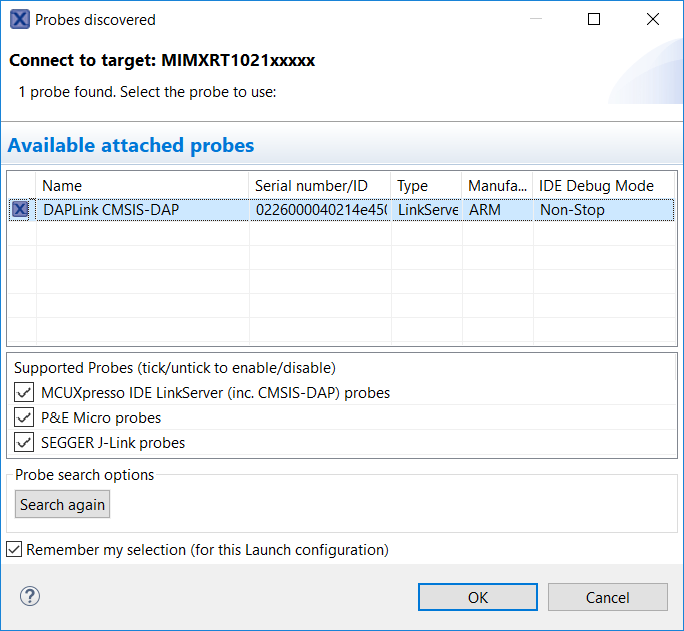
-
固件将被下载到板上,调试器开始运行。
-
打开一个终端程序,并连接到已显示的板上的COM端口。使用115200波特率,数据位为8, 无奇偶校验且停止位为1。
-
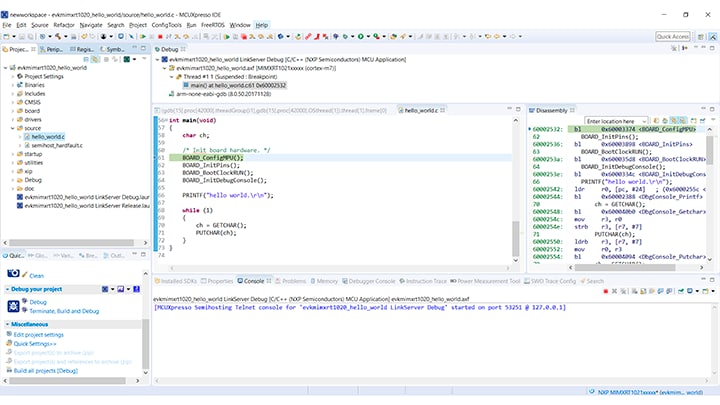
点击"Resume"按钮启动应用:

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。

-
使用菜单栏的控件暂停、进入和逐步执行指令,然后点击Terminate图标停止调试会话:

想使用其他工具链?
使用IAR EWArm
构建示例应用
遵循以下步骤运行hello_world示例应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
-
如果还未完成,在以下路径中打开所需的演示应用工作区。大多数示例应用演示区文件位于以下路径:
12
/boards/ / / /iar 以hello_world演示为例,路径为:
1
/boards/evkmimxrt1020/demo_apps/hello_world/iar/hello_world.eww -
从下拉列表中选择所需的构建目标。
在这个例子中,选择"hello_world–flexspi_nor_debug"目标。

-
为了构建演示应用,点击"Make"按钮,在下文用红色突出显示。

运行示例应用
如需下载并运行该应用,请执行以下步骤:
- 通过USB线将开发平台连接到您的PC
-
打开PC上的终端应用(如PuTTY或TeraTerm),并连接到调试COM端口。采用以下设置配置终端:
- 115200波特率,(参考board.h文件中的BOARD_DEBUG_UART_BAUDRATE变量)
- 无奇偶校验
- 数据位为8
- 停止位为1
-
在IAR中,点击"Download and Debug"按钮,将应用下载到目标。

-
然后,可将此应用下载到目标应用,并自动运行到main()函数。
-
点击"Go"按钮运行代码,以启动应用。

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。
Use Keil®MDK
安装CMSIS设备包
安装MDK工具后,必须安装Cortex®微控制器软件接口标准(CMSIS)设备包,才能从调试角度来说完全支持该设备。这些设备包包括存储器映射信息、寄存器定义和闪存编程算法。按照这些步骤安装MIMXRT102x CMSIS包。
-
打开名为µVision的MDK IDE。在IDE中,选择"Pack Installer"图标。

-
在Pack Installer窗口中,导航到Devices选项卡,然后在恩智浦下选择MIMXRT1021设备。

- 在Packs选项卡中,为MIMXRT1020-EVK板安装DFP。DFP名为恩智浦:MIMXRT1021_DFP。点击设备包旁的"Install"按钮。此流程需要连接互联网才能完成。
-
安装完成后,关闭Pack Installer窗口并返回到µVision IDE。

构建示例应用
遵循以下步骤运行hello_world应用。对于其他示例应用,这些步骤可能会略有不同,因为某些应用的路径可能会有额外的文件夹层级。
-
如果还未完成,在以下路径中打开所需的工作区:
12
/boards/ / / /mdk 此工作区文件名为
.uvmpw 1
/boards/evkmimxrt1020/demo_apps/hello_world/mdk/hello_world.uvmpw -
要构建演示项目,请选择"Rebuild"按钮,用红色突出显示。

-
构建将完成,并且不会报错。
运行示例应用
如需下载并运行该应用,请执行以下步骤:
-
通过USB线将开发平台连接到您的PC
-
打开PC上的终端应用(如PuTTY或TeraTerm),并连接到调试串行端口。采用以下设置配置终端:
- 115200波特率,(参考board.h文件中的BOARD_DEBUG_UART_BAUDRATE变量)
- 无奇偶校验
- 数据位为8
- 停止位为1
-
应用构建完成后,点击"Load"按钮,将应用下载到目标。

-
如需调试应用,请点击"Start/Stop Debug Session"按钮,用红色突出显示。

-
点击"Run"按钮运行代码,以启用应用。

-
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。

- 按Stop(停止)结束调试会话。

使用Arm®GCC
安装工具链
本节包含采用Kinetis SDK支持的Arm GCC工具链构建并运行KSDK演示应用所需的必要组件的安装步骤。Arm GCC工具有许多使用方式,但此例主要演示其在Windows环境中的使用。虽然这里未讨论,但GCC工具还可与Linux操作系统和Mac OSX配套使用。
安装GCC Arm嵌入式工具链
如需下载并运行安装程序,请访问GNU Arm Embedded Toolchain。这是我们实际使用工具链(例如,编译器、链接器等)。GCC工具链应当对应最新的支持版本,参见Kinetis SDK版本说明。
安装MinGW
Minimalist GNU for Windows(MinGW)开发工具提供了一套独立于第三方C-Runtime DLL(如Cygwin)的工具。KSDK所用的构建环境无需使用MinGW Build工具,但充分利用了MinGW和MSYS的基础安装。MSYS为与Unix类似的接口和工具提供基本的Shell。
-
从以下位置下载最新的MinGW mingw-get-setup安装程序:MinGW - Minimalist GNU for Windows Files。
-
运行安装程序。推荐的安装路径为C:\MinGW,但是,您可以将其安装到任何位置。
-
确保在Basic Setup菜单下选择了"mingw32-base"和"msys-base"。

-
点击"Installation"菜单中的"Apply Changes",并按照其余指令完成安装。

-
添加相应项目到Windows操作系统的Path环境变量。在"Environment Variables..."部分的Control Panel->System and Security->System->Advanced System Settings下可找到它。路径为:
1
\bin 假设默认安装路径为C:\MinGW,此例如下所示。如果路径设置不正确,工具链将不起作用。
如果您的Path变量中包含"C:\MinGW\msys\x.x\bin"(根据KSDK 1.0.0要求),删除该路径以确保新的GCC构建系统正常工作。

-
下载CMake 3.0.x请参见CMake
-
安装CMake,确保安装时选择"Add CMake to system PATH"选项。由用户选择是为所有用户还是只为当前用户将其安装到PATH。在这个示例中,假设为所有用户安装了此应用。

-
按照安装程序的其余指令操作。
-
可能需要重启系统,才能使PATH更改生效。
为ArmGCC_DIR添加新环境变量
创建新的系统环境变量并命名为ArmGCC_DIR。此变量的值应当指向Arm GCC嵌入式工具链安装路径,此例中的安装路径为:
1C:\Program Files (x86)\GNU Tools Arm Embedded\4.9 2015q3参考GNU Arm GCC嵌入式工具的安装文件夹,获得确切的安装路径名。

安装CMake
构建示例应用
要构建示例应用,请按照这些步骤操作。
-
如果没有运行,则打开GCC Arm嵌入式工具链命令窗口。要启动窗口,需从Windows操作系统“开始”菜单进入“Programs->GNU Tools Arm Embedded
” ,然后选择“GCC Command Prompt”。 -
将目录更改为示例应用项目目录,它有如下路径:
12
/boards/ / / /armgcc 对于本指南,确切的路径为:
1
/boards/evkmimxrt1020/demo_apps/hello_world/armgcc 
-
在命令行键入"build_flexspi_nor_debug.bat"或双击Windows操作系统Explorer中的"build_flexspi_nor_debug.bat"文件,执行构建。输出显示如图:

运行示例应用
本节将介绍使用J-Link GDB Server应用运行演示应用的步骤。要执行本练习,请先完成以下两步:
确保:
-
板上的OpenSDA接口是使用J-Link OpenSDA固件编程的。如果您的板不支持OpenSDA,则需要单独的J-Link Pod。
您拥有独立的J-Link Pod,并且连接至板的调试接口。请注意:某些硬件平台需要修改硬件,以便通过外部调试接口正常运行。
配置并连接J-Link接口之后,按照以下步骤下载并运行演示应用:
-
本板支持J-Link硬件调试器。使用前,请安装SEGGER软件(可通过segger主页下载)
-
通过OpenSDA USB端口和PC USB接头之间的USB线缆,将开发平台连接到PC。如果使用独立的J-Link调试Pod,请也将其连接至板的SWD/JTAG接头。
-
打开PC上的终端应用(如PuTTY或TeraTerm),并连接到调试串行端口。采用以下设置配置终端:
-
115200波特率,(参考board.h文件中的BOARD_DEBUG_UART_BAUDRATE变量)
无奇偶校验
数据位为8
停止位为1
-
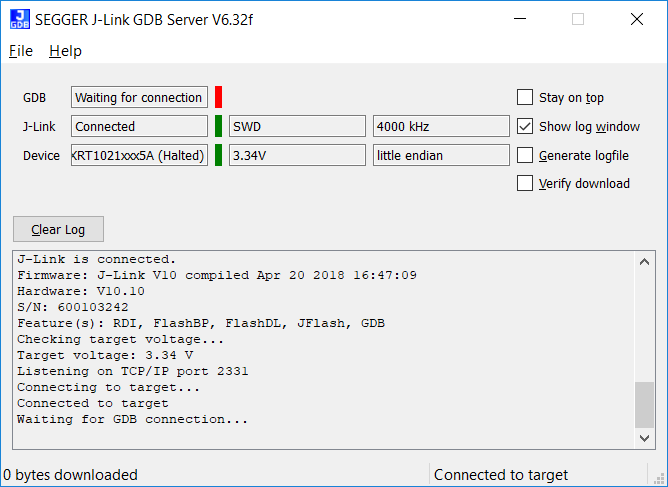
打开J-Link GDB服务器应用。访问SEGGER安装文件夹,例如:C:\Program Files(x86)\SEGGER\JLink_V632f。打开命令行窗口,使用命令"JLinkGDBServer.exe",调试并发布目标。注:对于sdram_debug和sdram_release目标,请使用命令
12
JLinkGDBServer.exescriptfile/boards/evkmimxrt1020/demo_apps/hello_world/ evkmimxrt1020_sdram_init.jlinkscript -
这个例子所选的目标设备为"MIMXRT1021xxx5A"。

-
设备连接后,屏幕显示如图:
-
如果没有运行,则打开GCC ArmM嵌入式工具链窗口。要启动该窗口,需从Windows操作系统的“开始”菜单转到 “Programs->GNU Tools Arm Embedded
”,然后选择“GCC Command Prompt”。 
-
更改为包含示例应用输出的目录。根据所选的构建目标,使用以下2个路径中的一个可以找到此输出:
12
/boards/ / / /armgcc/debug 12
/boards/ / / /armgcc/release 在这个示例中,路径为:
1
/boards/evkmimxrt1020/demo_apps/hello_world/armgcc/flexspi_nor_debug -
运行命令"arm-none-eabi-gdb.exe
.elf"。对于本示例,命令为“arm-none-eabi-gdb.exe hello_world.elf”。 
-
运行以下命令:
"target remote localhost:2331"
"monitor reset"
"monitor halt"
"load"
- 此应用已下载成功并停留在复位矢量。执行"monitor go"命令来启动演示应用。
hello_world应用开始运行,标语显示在终端上。如未显示,请检查您的终端设置和连接。
启动选项
i.MX RT系列支持许多不同的启动源,并包含将内存复制到片上或外部目标存储器的选项,以及某些接口的“就地执行”(XIP)。进一步了解您的选择,以及适合您的设计的最佳选择。
i.MX RT跨界MCU的启动选项

| 文档和视频 | 说明 |
|---|---|
| AN12108:如何从QSPI Flash启动 | 本文档介绍了如何使用Open SDA或MfgTool通过Flashloader将可启动镜像编程到外部存储设备中的分布讲解。 |
| AN12107:如何从8线SPI Flash和SD卡启动 | 本文档介绍了如何将可启动镜像编程到外部存储设备中。 |
工具和参考
MCUXpresso Secure Provisioning Tool一款基于GUI的应用,用于简化在恩智浦i.MX RT上可启动的可执行文件的生成和指配。
论坛启动资源在我们的论坛上寻找启动问题的答案或提交新问题。
外部存储器
| 文档和视频 | 说明 |
|---|---|
| AN12437:i.MX RT系列性能优化 | 如何优化在不同存储设备上运行的系统性能。 |
| AN12108:如何从QSPI Flash启动 | 本文档介绍了如何使用Open SDA或MfgTool通过Flashloader将可启动镜像编程到外部存储设备中的分布讲解。 |
| AN12107:如何从8线SPI Flash和SD卡启动 | 本文档介绍了如何将可启动镜像编程到外部存储设备中。 |
| AN12183:如何为FLEXSPI NOR Flash启用调试 | 本应用笔记介绍了如何编程、调试和配置新的FLEXSPI NOR Flash。 |
| 使用Adesto EcoXip存储器开发代码 | 了解如何使用Adesto EcoXip Flash设备配置恩智浦i.MX RT1050 EVKB板的硬件和软件要求。 |
| AN12564:在i.MX RT系列上实现边读边写(RWW) | 如何在i.MX RT系列上实现RWW要求。 |
| AN12239:如何使用i.MX RT启用HyperRAM | 如何将HyperRAM与i.MX RT MCU配合使用,包括硬件连接、HyperRAM协议、源代码和性能。 |
| AN13028:在i.MX RT上对HyperRAM/PSRAM的高级用法 | 本应用笔记介绍在i.MX RT MCU上与FlexSPI一起使用时,HyperRAM/PSRAM的高级用法,包括FlexSPI预取功能、HyperRAM/PSRAM刷新间隔以及支持的HyperRAM设备。 |
MCUXpresso SDK示例
SDK中提供了几个示例、演示和驱动程序,帮助您快速入门。下面列出了一些常见的外部存储器示例。
FlexSPI Nor轮询示例
如何在轮询中使用FlexSPI驱动程序。
路径:
1/boards/evkbimrt1020/driver_examples/flexspi/nor/polling_transfer EDMA传输示例
使用EDMA的多个数据传输示例。
路径:
1/boards/evkbimrt1020/driver examples/flexspi/nor/edma_transfer SDRAMC示例
如何使用SEMC控制器驱动程序初始化外部SDRAM芯片。
路径:
1/boards/evkbimrt1020/driver_examples/semc/sdram 工具和参考
MCUXpresso Secure Provisioning Tool一款基于GUI的应用,用于简化在恩智浦i.MX RT上可启动的可执行文件的生成和指配。
网络安全和完整性
i.MX RT1020采用安全设计,并由驱动片上系统(SoC)的安全软件提供支持。
| 文档和视频 | 说明 |
|---|---|
| i.MX RT安全启动实验室指南 | 了解如何使用i.MX系列的安全启动功能,包括如何生成密钥对和证书,如何使用leftosb工具编程熔丝以及签署固件。 |
| 在i.MX RT10xx跨界MCU上安全启动 | 了解有关安全启动功能以及如何使用MCUXpresso Secure Provisioning Tool配置这些功能的详细信息。 |
| MCUXpresso Secure Provisioning Tool快速入门 | 这些视频涵盖了工具的基本入门内容,并实时演示了该工具,展示了i.MX RT1060评估工具包中提供的各种指配类型和启动设备。 |
| 安全启动在线研讨会和演示 | 使用最新的恩智浦软件和工具,您可以在基于i.MX RT10xx MCU的设计中集成启动验证和加密执行。了解有关安全启动功能以及如何使用MCUXpresso Secure Provisioning Tool配置这些功能的详细信息。 |
| 满足当今的安全需求:使用跨界处理器实现端到端安全 | 了解物联网终端和边缘节点应满足的共同安全目标,以及在终端设备中实现信任根所需的步骤、工具和程序。 |
| AN12800:i.MX RT10xx熔丝配置,为您保驾护航 | 对于安全应用,有些熔丝与安全功能无关,可能需要进行配置。本文档介绍针对安全应用的熔丝配置,并提供熔丝配置建议。 |
| AN12419:面向i.MX RT10xx的Secure JTAG | 本文档介绍如何使用i.MX RT10xx MCU系列上的Secure JTAG。 |
| AN12901:DCP——如何进行密钥管理 | i.MX RT10xx提供数据协处理器(DCP)模块,该模块支持高级加密标准(AES)加密和散列功能。此应用笔记介绍如何将AES模块用于不同的密钥,以及如何管理密钥。 |
MCUXpresso SDK示例
SDK中提供了几个示例、演示和驱动程序,帮助您快速入门。下面列出了一些与安全性和完整性相关的常见示例。
DCP示例
使用KSDK软件通过DCP软件驱动实现多种加密算法的演示程序。
路径:
1/boards/evkbimrt1020/driver_examples/dcp BEE示例
演示如何设置BEE驱动程序,以便对QSPI存储区中存储的数据进行动态解密。
路径:
1/boards/evkbimrt1020/driver_examples/bee Mbedtls示例
程序执行加密算法的基准和测试。(需要可选的mbedTLS中间件包)。
路径:
1/boards/evkbimrt1020/mbedtls_examples/ 工具和参考
一站式安全启动工具:恩智浦-MCUBootUtility:专为恩智浦MCU安全启动而设计的GUI工具。它包含了恩智浦官方安全支持工具集的所有功能,并支持完整的图形用户界面操作。
MCUXpresso Secure Provisioning Tool一款基于GUI的应用,用于简化在恩智浦i.MX RT上可启动的可执行文件的生成和指配。
有线通信
| 文档和视频 | 说明 |
|---|---|
| 恩智浦微控制器的有线通信中间件 | 了解通过MCUXpresso SDK提供的有线通信库和示例。 |
| 恩智浦MCUXpresso SDK中的CANopen | 如何使用恩智浦MCUXpresso SDK随附的EmSA CANopen库。 |
| 采用i.MX RT 1064和LPC55的CANopen和Embedded Wizard演示 | 使用i.MX RT1064和LPC55S16演示板结合恩智浦MCUXpresso SDK不同中间件组件进行的演示 |
| AN12822:在RT1050上使用FlexIO模拟8080总线 | 如何使用FlexIO模块模拟8080并行总线,并驱动具有8080总线接口的图形TFT LCD。 |
| AN12679:使用基于恩智浦SDK的i.MX RT实现高速RS-485应用 | 如何实现与恩智浦i.MX RT系列EVK的RS-485通信,以及基于恩智浦MCUXpresso SDK的软件设计。 |
| MCU技术时刻|CANopen和MCUXpresso快速入门 | 了解如何下载包含EmSA的CANopen协议栈的SDK,并创建一个管理器和一个设备CANopen网络。 |
MCUXpresso SDK示例
SDK中提供了几个示例、演示和驱动程序,帮助您快速入门。下面列出了有线通信的一些常见示例。
CANopen示例
实施最小的CANOpen Manager和CIA 401通用I/O设备。(需要可选的CANopen中间件包)。
路径:
1/boards/evkbimrt1020/canopen_examples/ Lwip示例
使用ICMP协议的lwIP TCP/IP软件栈的各种演示和示例。(需要可选的lwIP中间件包)。
路径:
1/boards/evkbimrt1020/lwip_examples/ USB示例
SDK中存在大量主机和设备操作的USB示例。(需要可选的USB主机、设备、OTG协议栈中间件包)。
路径:
1/boards/evkbimrt1020/usb_examples/ AWS以太网示例
Amazon FreeRTOS Qualification(AFQ)、设备配置、AWS Greengrass发现、使用Android移动应用的远程控制和阴影灯泡演示。
路径:
1/boards/evkbimrt1020/aws_examples 工具和参考
加速开发使用CANopen和CANopen FD实现稳健网络通信恩智浦已与EmSA合作,提供CANopen作为强大的软件使能技术。MCUXpresso SDK中提供基于MicroCANopen Plus v7.0的完全集成的CANopen库。
无线连接
无线连接
| 文档和视频 | 说明 |
|---|---|
| 恩智浦微控制器的云连接 | 集成了对Amazon Web Services、Microsoft Azure和谷歌Cloud IoT等云服务的支持。 |
| AN12257:物联网设备与LoRa的安全连接 | 本文档介绍如何在网关和终端设备之间建立与LoRa的安全物联网连接。 |
| 恩智浦携手松下公司提供的i.MX RT和Wi-Fi解决方案 | 了解i.MX RT跨界MCU和可用的支持Wi-Fi®模块,包括双频PAN9026 Wi-Fi 4 + Bluetooth™5.0无线模块。 |
电源管理
电源管理包括设备专用的技术以及有关电源管理和低功耗优化的信息。
| 文档和视频 | 说明 |
|---|---|
| AN12085:如何使用i.MX RT低功耗功能 | 介绍i.MX RT系列的低功耗应用设计要点。 |
| AN12204:i.MX RT1020功耗与测量 | 本文介绍了i.MX RT1050的功耗,包括运行模式和低功耗模式配置,以及不同电源模式下的功耗。 |
音频
| 文档和视频 | 说明 |
|---|---|
| 恩智浦微控制器上的音频软件 | 中间件、示例应用、MCUXpresso Config工具和高级音频应用的合作伙伴解决方案。 |
| AN12090:SAI的多通道特性使用讲解 | 本文档介绍了7.1环绕声系统所采用的技术(包括SAI和FLAC),并指导如何使用多通道SAI功能开发以适当的高性能方式运行的应用。 |
MCUXpresso SDK示例
SDK中提供了几个示例、演示和驱动程序,帮助您快速入门。下面列出了一些与电机控制相关的常见示例。
SAI演示
演示复杂的数字音频播放和录制用例。
路径:
1/boards/evkbimxrt1020/demo_apps/sai SAI外设演示
演示复杂的数字音频播放和录制用例。
路径:
1/boards/evkbimxrt1020/demo_apps/sai_peripheral SAI驱动程序示例
如何将SAI驱动程序与EDMA、中断、录制和播放功能配合使用。
路径:
1/boards/evkbimxrt1020/driver_examples/sai I2S演示
如何将flexio_i2s驱动程序与EDMA和中断结合使用
路径:
1/boards/evkbimxrt1020/driver_examples/flexio/i2s USB音频示例
裸机和FreeRTOS的音频录制和播放示例。
路径:
1/boards/evkbimxrt1020/usb_examples 语音
| 文档和视频 | 说明 |
|---|---|
| 语音处理 | 恩智浦的一系列语音控制和通信软件和解决方案,包括免费的语音识别技术。 |
| AN13065:带TensorFlow Lite推理功能的性别语音识别 | 本文档介绍了在性别语音音频样本和分类方面训练TensorFlow模型的步骤。 |
| AN12975:MCU Alexa语音解决方案支持AzureWave AW-NM372SM WiFi/BT | 如何修改SLN-ALEXA-IOT硬件和软件,以支持AzureWave AW-NM372SM IEEE802.11b/g/n W-LAN和蓝牙模块。 |
工具和参考
恩智浦基于EdgeReady MCU的解决方案面向Alexa Voice Service (AVS)这款解决方案采用i.MX RT跨界MCU,让开发人员能够快速、轻松地将Alexa语音助手功能添加到自己的产品。
电机控制
电机控制是一个复杂而先进的课题,非常复杂,也有很多缺陷,具体取决于电机的数量、电机类型以及有传感器的电机驱动器和无传感器的电机驱动器。
恩智浦拥有许多现成可用的电机控制算法(中间件),入门的最佳方法是使用MCUXpresso SDK中包含的FreeMaster示例。这些示例利用FreeMASTER运行时调试工具,它是一种用户友好的实时调试监测器和数据可视化工具,可用于运行时配置和调试嵌入式软件应用。
FreeMASTER支持对正在运行的系统上的变量进行非侵入式监测,并且可以在示波器式显示器上以标准小部件(仪表、滑块等)或文本形式的数据形式显示多个变量,从而提供易于使用的数据记录器。它可以将HTML、MATLAB®或Excel链接到其他可编写脚本的框架以及Node-RED等流行的可视化编程工具。
| 文档和视频 | 说明 |
|---|---|
| 使用i.MX RT让电机旋转起来 | 本演示内容涵盖了旋转BLDC、PMSM或ACIM电机的MCU要求、电机控制基础知识和框架,以及如何在i.MX RT上实现电机控制。 |
| AN12214:MIMXRT10xx EVK上的PMSM磁场定向控制的应用笔记 | 介绍了用于三相永磁同步电机(PMSM)的传感器以及无传感器速度和位置电机控制软件的实现。 |
| MIMXRT10xx EVK PMSM磁场定向控制用户指南 | 分步指南,介绍如何在最常见的IDE中打开、编译、调试和运行永磁同步电动机(PMSM)项目,以及如何将恩智浦Freedom PMSM功率模块和i.MX RT10xx评估套件转换为完整的电机控制参考设计。 |
| AN12659:恩智浦4核电机控制开发平台硬件介绍 | 介绍了恩智浦4核电机控制开发平台的模块化架构,并对不同组件进行了详细的硬件描述。 |
| AN12200:i.MX RT上的双FOC伺服电机控制 | 介绍了采用恩智浦i.MX RT1020处理器的双伺服演示。可用作基于其他i.MX RT产品的电机控制应用开发的参考。 |
| FreeMASTER操作方法 | 工程师使用FreeMASTER工具的入门指南。 |
| FreeMASTER 3.0安装指南 | 本文将指导您完成FreeMASTER 3.0的安装过程。 |
| FreeMASTER四部分在线研讨会系列 | 按需培训概要介绍FreeMASTER软件、其特性、功能、可用示例、应用用例以及如何轻松入门。 |
MCUXpresso SDK示例
SDK中提供了几个示例、演示和驱动程序,帮助您快速入门。下面列出了与电动机控制相关一些常见示例。
ACIM
交流感应电机中间件。
路径:
1/middleware/acim BLDC
无刷直流电机中间件。
路径:
1/middleware/bldc Freemaster
面向电机控制示例的Freemaster中间件。
路径:
1/middleware/freemaster PMSM
永磁同步电机中间件。
路径:
1/middleware/pmsm 工具和参考
RTCESL库:一组算法,从基础数学运算到高级数学变换以及高级观测器,这些都可以方便地用在复杂的实时控制应用中以及我们的电机控制参考设计中。
AMCLIB用户指南介绍了高级电机控制库(AMCLIB)和针对基于Arm CortexM7F内核的微控制器系列的优化功能。
四电机控制开发平台:展示单个i.MX RT1050跨界MCU如何控制多达4个不同的电机,同时管理有线或无线连接以及一个HMI接口。
Tera Term教程
Tera Term教程
Tera Term是一款备受欢迎的开源终端仿真应用。此程序可用来显示从恩智浦开发平台虚拟串行端口发送的信息。
- 从SourceForge下载Tera Term。下载完成后,运行安装程序,然后返回到该页面继续操作。
- 启动Tera Term。首次启动时,会显示以下对话。选择串行选项。假设您已插入板,列表中会自动填充一个COM端口。
- 配置串行端口设置(使用之前确定的COM端口号),波特率为115200,数据位为8,无奇偶校验且停止位为1。要进行此操作,进入Setup->Serial Port并更改设置。
- 确认连接已打开。如已连接,Tera Term将在标题栏中显示以下内容。
- 一切就绪



设计资源
支持
培训
要了解帮助步骤,请先找到您的问题。如果仍需帮助,请联系恩智浦支持。
| 培训 | 说明 |
|---|---|
| 使用MCUXpresso IDE和MCUXpresso配置工具开发基础应用 | 该视频系列分为三部分,介绍使用导入的SDK示例项目或创建新项目时,MCUXpresso IDE和Config Tools之间的基础交互。 |
| MCU技术时刻:i.MX RT系列的主要功能和优点 | 这些简短的视频演示介绍了i.MX RT系列的一些主要功能和优点。 |
| i.MX RT10xx培训 | 关于恩智浦此产品的点播培训、操作指南视频和在线研讨会完整列表。 |
传感器
用多种恩智浦传感器解决方案探索世界。恩智浦为您的项目提供专用传感器解决方案,包括加速度传感器、压力传感器和触摸传感器等。详情请参见传感器
NFC
近场通信是一种简单、直观的技术,让您仅需轻触一下便可与周围世界安全交互。如需了解关于恩智浦NFC解决方案的更多信息,请访问NFC
i.MX和MCUXpresso网络社区
与其他工程师交流,并获得使用i.MX处理器和MCUXpresso软件和工具进行设计的专家建议。在以下两个专业网络社区中,选择一个加入社区讨论:i.MX网络社区或MCUXpresso软件和工具网络社区